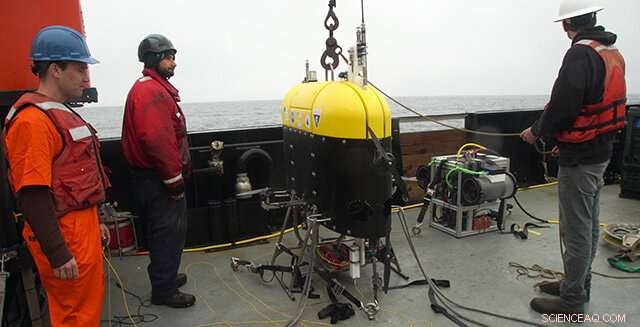
Engenheiros da Woods Hole Oceanographic Institution e a tripulação do navio no R / V Rachel Carson se preparam para lançar o Mesobot na Baía de Monterey. O "SmartClump" do MBARI está em segundo plano, aguardando implantação. Crédito:Erik Olsen / WHOI
No final de junho, pesquisadores do MBARI se juntaram a engenheiros da Woods Hole Oceanographic Institution (WHOI) para testar uma nova espécie de robô submarino projetado para abrir novos caminhos de pesquisa no mesopelágico, também conhecida como zona crepuscular do oceano. Este veículo, o Mesobot, originado no WHOI e foi desenvolvido nos últimos dois anos com contribuições críticas de cientistas e engenheiros do MBARI, Universidade de Stanford, e a Universidade do Texas Rio Grande Valley. O Mesobot é projetado especificamente para rastrear e estudar animais nadadores e à deriva, tanto quanto 1, 000 metros (3, 300 pés) abaixo da superfície por até 24 horas seguidas.
O Mesobot ampliará e ampliará o trabalho anterior em águas intermediárias do MBARI e de outras instituições. Por décadas, Os pesquisadores do MBARI liderados por Bruce Robison e Steve Haddock e outros usaram veículos operados remotamente (ROVs) para estudar esses animais intermediários. Embora raramente visto, essas criaturas ajudam a apoiar pescarias importantes, como atum e espadarte, fornecer comida para outros animais de grande porte, como tubarões e baleias, e ajudar a regular o clima da Terra movendo o carbono da superfície para as águas profundas.
O projeto está sendo financiado pela National Science Foundation, WHOI, MBARI, e o Audacious Project do TED.
A equipe de várias instituições projetou o Mesobot para ser menos prejudicial aos animais do fundo do mar do que a maioria dos ROVs, equipando-o com câmeras 4K de baixa luminosidade, luzes vermelhas que são menos visíveis aos animais no mesopelágico, e grande, hélices de giro lento que minimizam perturbações na água. O software de computador de última geração também permite que o veículo rastreie animais ou objetos embaixo d'água por até 24 horas por vez, conforme eles se movem em sua migração vertical diária.

Esta foto mostra o Mesobot rastreando um animal marinho simulado (objeto branco na corda) no tanque de teste do MBARI. Crédito:WHOI / Erik Olsen
O Mesobot é um híbrido entre um ROV, que é alimentado e controlado por meio de uma corda presa a um navio de superfície, e um veículo subaquático autônomo (AUV), que é programado na superfície e opera sem intervenção humana enquanto está debaixo d'água.
No início de cada mergulho, os operadores controlam o Mesobot da superfície como um ROV, usando uma corda de fibra óptica fina. Os pesquisadores então soltam a corda e a enrolam de volta no navio, enquanto o robô continua sozinho como um AUV.
A equipe do MBARI esteve envolvida em vários aspectos do projeto. Engenheiro Principal Kakani Katija, O cientista sênior Bruce Robison, e o engenheiro mecânico Brett Hobson estiveram envolvidos no projeto conceitual do veículo. O sistema de computador principal do veículo é baseado em um projeto desenvolvido para o AUV de longo alcance da MBARI. O sistema de rastreamento de animais está sendo projetado pelo engenheiro de software Mike Risi, junto com Katija e MBARI Adjunct e Professor da Universidade de Stanford Steve Rock, baseado em um sistema que já foi testado em vários ROVs MBARI.
Durante o recente programa de campo, os engenheiros da equipe montaram o Mesobot e o testaram no enorme tanque interno de teste de água salgada do MBARI. Depois de confirmar que o veículo estava funcionando corretamente, eles o levaram ao mar no navio de pesquisa do MBARI Rachel Carson para três dias de testes de campo em águas abertas na baía de Monterey.

Lançando o Mesobot do convés do navio de pesquisa do MBARI Rachel Carson. Crédito:WHOI / Erik Olsen
Durante os testes de campo, o Mesobot fez cinco mergulhos, cada um várias centenas de metros abaixo da superfície. Esses testes ajudaram os projetistas a testar os sistemas do veículo em condições reais e a refinar seus métodos para lançar o veículo do lado de um navio em movimento. Gerenciar a corda fina apresentou um particular, mas esperado, desafio. "O conjunto de instrumentação científica a bordo do Rachel Carson e o manuseio especializado do navio e trabalho de convés foram cruciais para o nosso sucesso, "disse a designer e engenheira-chefe do Mesobot, Dana Yoerger.
Para ajudar a ficar de olho no veículo e em suas amarras, a equipe usou o "SmartClump do MBARI, "um conjunto ponderado de sensores e câmeras presos a uma corda. Isso dá aos pilotos e cientistas uma perspectiva aérea que torna as operações subaquáticas mais seguras e eficientes.
Eventualmente, os pesquisadores esperam usar o Mesobot para realizar estudos de um dia inteiro de animais individuais ou grupos de animais enquanto eles participam da "migração vertical diurna" - a maior migração animal na Terra. Muitos animais marinhos (incluindo delicados, geléias de corpo mole) migram centenas de metros em direção à superfície do oceano no crepúsculo e, em seguida, descem de volta às profundezas ao amanhecer. Este fenômeno ainda é pouco compreendido. Os pesquisadores esperam que o Mesobot seja capaz de seguir animais individuais durante sua migração para aprender mais sobre como e por que eles passam por essa árdua jornada diária.














