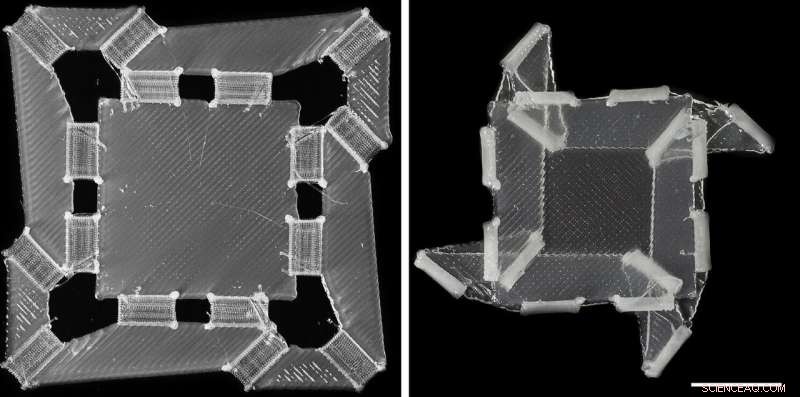
Unidade de origami de torção quadrada. Crédito:Kotikian et al., Sci. Robô. 4, eaax7044 (2019)
A maioria dos soft robôs hoje depende de energia e controle externos, mantendo-os presos a sistemas externos ou equipados com componentes rígidos. Agora, pesquisadores da Escola de Engenharia e Ciências Aplicadas (SEAS) de Harvard John A. Paulson e da Caltech desenvolveram sistemas robóticos suaves, inspirado por origami, que pode se mover e mudar de forma em resposta a estímulos externos, pavimentando o caminho para robôs soft totalmente livres.
A pesquisa é publicada em Ciência Robótica .
"A capacidade de integrar materiais ativos em objetos impressos em 3D permite o design e a fabricação de classes inteiramente novas de matéria robótica macia, "disse Jennifer A. Lewis, o Hansjorg Wyss Professor de Engenharia Biologicamente Inspirada no SEAS e co-autor principal do estudo.
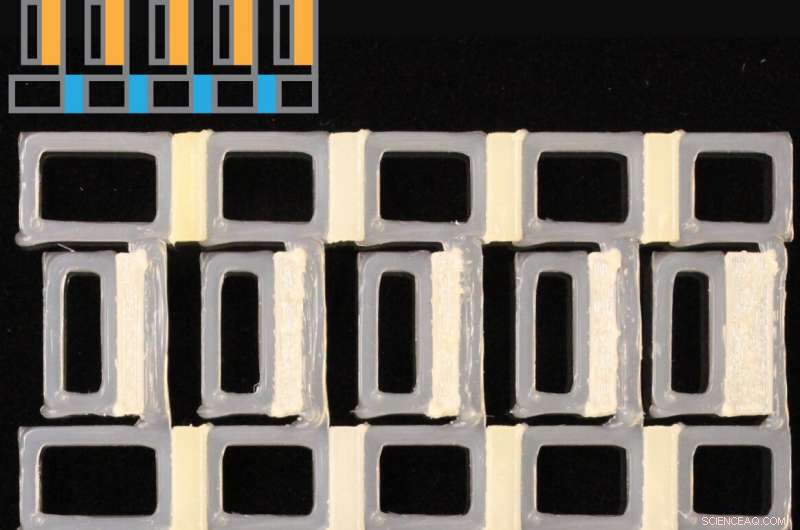
Os pesquisadores recorreram ao origami para criar robôs soft multifuncionais. Por meio de dobras sequenciais, origami pode codificar várias formas e funcionalidades em uma única estrutura. Usando materiais conhecidos como elastômeros de cristal líquido que mudam de forma quando expostos ao calor, a equipe de pesquisa imprimiu em 3D dois tipos de dobradiças macias que se dobram em diferentes temperaturas e, portanto, podem ser programadas para dobrar em uma ordem específica.
"Com nosso método de impressão 3-D de dobradiças ativas, temos total capacidade de programação em relação à resposta de temperatura, a quantidade de torque que as dobradiças podem exercer, seu ângulo de curvatura, e orientação da dobra. Nosso método de fabricação facilita a integração desses componentes ativos com outros materiais, "disse Arda Kotikian, estudante de pós-graduação na SEAS e na Escola de Pós-Graduação em Artes e Ciências e co-autor do artigo.
"O uso de dobradiças torna mais fácil programar funções robóticas e controlar como um robô mudará de forma. Em vez de fazer com que o corpo inteiro de um robô macio se deforme de maneiras que podem ser difíceis de prever, você só precisa programar como algumas pequenas regiões de sua estrutura responderão às mudanças de temperatura, "disse Connor McMahan, um estudante de graduação na Caltech e co-autor do artigo.
Para demonstrar este método, Kotikian, McMahan, e a equipe construiu vários dispositivos soft, incluindo um soft robot sem amarras apelidado de "Rollbot". O Rollbot começa como uma folha plana, cerca de 8 centímetros de comprimento e 4 centímetros de largura. Quando colocado em uma superfície quente, cerca de 200 ° C, um conjunto de dobradiças dobra e o robô se enrola em uma roda pentagonal.
Outro conjunto de dobradiças está embutido em cada um dos cinco lados da roda. Uma dobradiça dobra quando em contato com a superfície quente, impulsionando a roda para virar para o próximo lado, onde a próxima dobradiça dobra. À medida que rolam para fora da superfície quente, as dobradiças se abrem e estão prontas para o próximo ciclo.
"Muitos robôs soft existentes exigem uma amarração para sistemas externos de energia e controle ou são limitados pela quantidade de força que podem exercer. Essas dobradiças ativas são úteis porque permitem que os robôs soft operem em ambientes onde as amarras são impraticáveis e levantem objetos muitas vezes mais pesado do que as dobradiças, "disse McMahan.
Outro dispositivo, quando colocado em um ambiente quente, pode dobrar em uma forma dobrada compacta semelhante a um clipe de papel e desdobrar-se quando resfriado.
"Essas estruturas não amarradas podem ser controladas passivamente, "disse Kotikian." Em outras palavras, tudo o que precisamos fazer é expor as estruturas a ambientes de temperatura específica e elas responderão de acordo com a forma como programamos as dobradiças. "
Embora esta pesquisa se concentre apenas nas respostas de temperatura, elastômeros de cristal líquido também podem ser programados para responder à luz, pH, umidade e outros estímulos externos.
Rollbot autopropelido mostrado em sua configuração impressa (acima) e em sua configuração dobrada (abaixo). Crédito:Kotikian et al., Sci. Robô. 4, eaax7044 (2019)
"Este trabalho demonstra como a combinação de polímeros responsivos em um compósito arquitetado pode levar a materiais com auto-atuação em resposta a diferentes estímulos. No futuro, tais materiais podem ser programados para realizar tarefas cada vez mais complexas, borrando as fronteiras entre materiais e robôs, "disse Chiara Daraio, Professor de Engenharia Mecânica e Física Aplicada na Caltech e co-autor principal do estudo.














