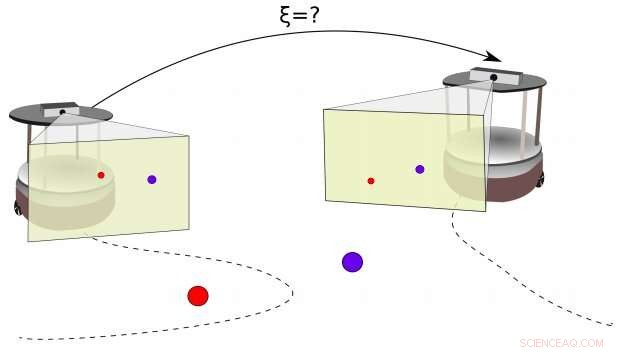
Uma representação do problema abordado no estudo recente. Dois robôs estão observando um par de pontos 3D. Os pesquisadores propõem um pipeline para estimar simultaneamente a profundidade 3D dos dois pontos 3D e, simultaneamente, obter sua pose relativa. Crédito:Rodrigues et al.
Pesquisadores da Universidade do Porto em Portugal e do Royal Institute of Technology KTH na Suécia desenvolveram recentemente um framework que pode estimar a profundidade e a postura relativa de dois robôs terrestres que estão colaborando em uma determinada tarefa. Sua estrutura, descrito em um artigo pré-publicado no arXiv, pode ajudar a melhorar o desempenho de vários robôs em tarefas que envolvem exploração, manipulação, cobertura, amostragem e patrulhamento, bem como em missões de busca e salvamento.
Nos últimos anos, pesquisadores têm realizado um número crescente de estudos voltados para o desenvolvimento de soluções para coordenar efetivamente vários robôs dentro de uma arquitetura descentralizada. Para enfrentar com eficácia uma determinada tarefa como um grupo, robôs individuais dentro de um enxame ou formação devem estar, pelo menos parcialmente, cientes da pose de outros agentes em seus arredores.
Esses dados relacionados à pose, conhecido como informação de pose relativa, permite que um agente otimize a função de um determinado objetivo, re-planeje suas trajetórias e evite colisões com outros robôs. Em algumas configurações do mundo real, Contudo, pode ser difícil para os agentes obter estimativas precisas de pose relativa. Por exemplo, durante missões extremas em áreas remotas ou isoladas, robôs podem encontrar problemas com canais de comunicação e com posicionamento de alta precisão ou sistemas de captura de movimento.
Com isso em mente, a equipa de investigadores da Universidade do Porto e do KTH pretendeu desenvolver um framework que pudesse melhorar a estimativa de profundidade 3-D e a estimativa de pose relativa de robôs terrestres que trabalham em conjunto para um objetivo comum. Eles se concentraram especificamente em um cenário envolvendo dois veículos terrestres autônomos navegando em um ambiente desconhecido, ambos equipados com câmeras em perspectiva.
Pipeline do framework proposto pelos pesquisadores. Crédito:Rodrigues et al.
"O problema de estimativa de profundidade visa recuperar as informações 3-D do ambiente, "os pesquisadores explicam em seu artigo." O problema de localização relativa consiste em estimar a postura relativa entre dois robôs, sentindo a pose um do outro ou compartilhando informações sobre o ambiente percebido. "
A maioria das soluções existentes para estimativa de profundidade e localização relativa em robôs funcionam analisando um conjunto desconectado de dados, sem levar em consideração a ordem cronológica dos eventos. A abordagem proposta pelos pesquisadores, por outro lado, considera as informações coletadas pelos dois robôs individualmente por meio de suas câmeras e, em seguida, combina isso para calcular a pose relativa entre eles. As informações de estimativa de profundidade coletadas pelos dois agentes e comandos de entrada são alimentadas a um Filtro de Kalman Estendido (EKF), que é projetado para processar esses dados e estimar a postura relativa entre os robôs.
"Embora as soluções anteriores para este problema considerem um conjunto de duas ou mais imagens do ambiente ou usem alguma configuração especial da frota (por exemplo, os robôs estão no campo de visão uns dos outros ou têm a capacidade de detectar as informações de rumo uns dos outros. posições), propomos um framework que compartilha um conjunto de observações comuns do ambiente no respectivo frame local de cada robô (recursos de ponto 3-D são empregados), "escrevem os pesquisadores.
Os pesquisadores avaliaram sua estrutura em uma série de cenários simulados, usando dois robôs terrestres chamados TurtleBots. Suas descobertas sugerem que sua abordagem de fato permite uma estimativa de profundidade eficaz e localização relativa para dois robôs colaborando em uma tarefa. Em seu trabalho futuro, os pesquisadores planejam também considerar o controle ativo de dois robôs no mesmo cenário explorado em seu estudo recente, bem como outros aspectos relevantes para a sua coordenação.
© 2019 Science X Network