Uma ilustração do conceito de ponta do dedo fluido dos pesquisadores. Crédito:Mizushima et al.
Pesquisadores da Universidade de Kanazawa desenvolveram recentemente um sistema de redução de atrito baseado em um efeito lubrificante, que poderia ter aplicações de robótica leve interessantes. Seu sistema, apresentado em um artigo publicado na Taylor &Francis ' Robótica Avançada Diário, pode ajudar no desenvolvimento de robôs que podem manipular objetos com eficiência, tanto em condições secas quanto úmidas.
"Nossa textura de superfície ou pele desenvolvida anteriormente para mãos robóticas macias oferece alta fricção em condições secas e úmidas, "Tetsuyou Watanabe, um dos pesquisadores que realizou o estudo, disse TechXplore. "Contudo, este alto atrito torna vários estilos de manipulação (incluindo liberação e deslizamento) difíceis. Em alguns casos, um objeto agarrado adere à superfície. Para superar esse problema, desenvolvemos um novo sistema de redução de fricção utilizando lubrificantes. "
Ao desenvolver seu sistema, Watanabe e seus colegas se inspiraram no comportamento humano. Eles observaram que nos supermercados as pessoas costumam lamber os dedos para abrir sacolas ou recipientes plásticos. Ações semelhantes também são realizadas ao tentar pegar folhas de papel ou virar as páginas de um livro.
Os pesquisadores descobriram que este comportamento de 'lamber o dedo' é particularmente comum em pessoas de meia-idade ou idosos, como o envelhecimento normalmente leva a uma pele mais seca. Pessoas mais jovens, por outro lado, muitas vezes não precisam lamber os dedos ao tentar manipular plástico ou papel, porque eles podem controlar automaticamente a fricção da pele por meio dos mecanismos de suor do corpo.
"Claro, o objetivo de lamber os dedos é obter alta fricção, e totalmente diferente do nosso propósito (ou seja, redução de atrito), "Watanabe disse." No entanto, normalmente, o objetivo dos lubrificantes é reduzir o atrito em sistemas mecânicos. Assim, consideramos a possibilidade de um sistema de redução de atrito semelhante ao controle do suor em humanos. "
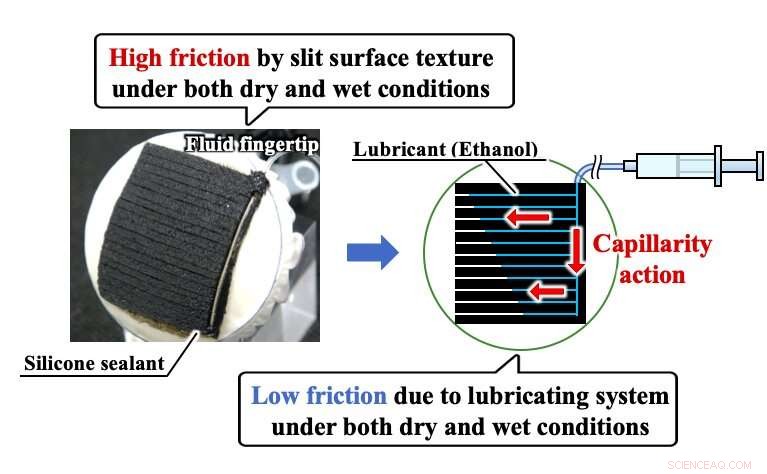
Os pesquisadores construíram um dedo robótico com fendas na superfície. Quando os lubrificantes (por exemplo, etanol) são injetados em torno dos limites dessas fendas, eles permeiam toda a superfície, por meio de uma ação capilar.
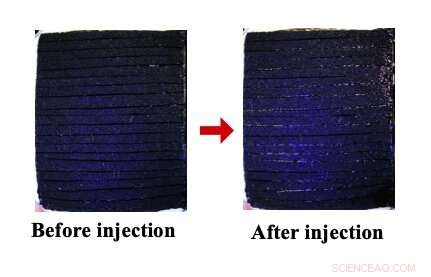
A ponta do dedo antes e depois de o etanol ser injetado nele. Crédito:Mizushima et al.
"Utilizamos a fina área de superfície, incluindo textura, e o sistema funciona não apenas em corpos rígidos, mas também em corpos deformáveis, sem perda de adaptabilidade à forma de um objeto, "Watanabe disse." Portanto, a principal vantagem do nosso sistema é que o atrito da superfície pode ser controlado, mantendo a deformabilidade e adaptabilidade da superfície. Isso significa que o sistema desenvolvido pode ser acoplado a robôs com corpos macios. "
Nos últimos anos, o uso de corpos moles se tornou cada vez mais popular na robótica, devido à sua alta deformabilidade e adaptabilidade. Por exemplo, robôs macios podem se mover mais livremente em seus arredores, sem apresentar danos extensos ao bater em paredes ou obstáculos. Além disso, mãos robóticas macias podem se adaptar à forma de um objeto enquanto o agarra, o que permite estratégias de manipulação mais avançadas.
"Outra vantagem importante do nosso sistema é que ele funciona em condições secas e úmidas, "Watanabe acrescentou." Portanto, é muito útil para robôs que trabalham em ambientes humanos, porque o trabalho doméstico é realizado sob ambas as condições. "
Os pesquisadores embutiram seu sistema na ponta de um dedo robótico e avaliaram seu desempenho em uma série de experimentos que envolveram agarrar e soltar objetos. Suas descobertas sugerem que a técnica de lubrificação que desenvolveram pode efetivamente reduzir o atrito em condições úmidas e secas.
"Como você pode imaginar pelo comportamento humano de lamber os dedos, a água pode aumentar o atrito e, em alguns casos, permite que a pele grude nas superfícies, "Watanabe disse." Em contraste, o etanol reduz o atrito. O fator importante para a redução do atrito é o coeficiente de espalhamento intimamente associado às forças capilares (isto é, tensão superficial). "
Nesse contexto, uma força capilar baixa acarreta a fácil difusão do líquido por toda a superfície. Usando etanol, que tem uma força capilar baixa, os pesquisadores conseguiram reduzir o atrito e espalhar facilmente o lubrificante por toda a superfície da ponta do dedo. Outra vantagem do etanol é sua alta volatilidade, o que reduz consideravelmente o tempo de tato.
“Também observamos que para facilitar o funcionamento do nosso sistema, a superfície não deve ser completamente lisa, "Watanabe acrescentou." Uma superfície um pouco áspera ou irregular pode melhorar ainda mais sua função. "
Em breve, os robôs poderão suportar humanos em uma variedade de ambientes, por exemplo, ajudá-los nas tarefas domésticas ou fornecer cuidados de enfermagem. Como essas tarefas são geralmente realizadas em condições secas e úmidas, o sistema de redução de fricção dos pesquisadores pode ser muito útil.
"Manusear e manipular objetos são os principais alvos de nossa pesquisa e, então, as tarefas que incluem essas ações são os aplicativos-alvo, "Watanabe disse." Alguns exemplos são roupas dobráveis, cozinhando, lavando, etc. "
No futuro, o sistema de lubrificação desenvolvido por Watanabe e seus colegas poderia informar o desenvolvimento de robôs macios que podem manipular objetos de forma mais eficaz, em ambientes secos e úmidos. Os pesquisadores agora estão planejando novas pesquisas com o objetivo de delinear e ampliar as possíveis aplicações de seu sistema.
"Atualmente, combinamos apenas as pontas dos dedos com nosso sistema, "Watanabe disse." Como próximo passo, gostaríamos de aplicar nosso sistema de controle de fricção a uma mão robótica. Além disso, as aplicações para o sistema ainda não estão claras, então gostaríamos de delinear metodologias apropriadas para operações reais, como dobrar ou cozinhar. "
© 2019 Science X Network