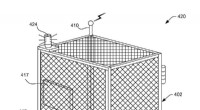
p Este robô macio é feito de kirigami - um antigo papel artesanal japonês que depende de cortes, em vez de dobras de origami, para alterar as propriedades de um material. Conforme o robô se alonga, o kirigami é transformado em uma superfície texturizada 3-D, que agarra o solo como pele de cobra. Crédito:Ahmad Rafsanjani / Harvard SEAS
p Este robô macio é feito de kirigami - um antigo papel artesanal japonês que depende de cortes, em vez de dobras de origami, para alterar as propriedades de um material. Conforme o robô se alonga, o kirigami é transformado em uma superfície texturizada 3-D, que agarra o solo como pele de cobra. Crédito:Ahmad Rafsanjani / Harvard SEAS
p Quem precisa de pernas? Com seus corpos elegantes, cobras podem deslizar até 14 milhas por hora, espremer em um espaço apertado, escalar árvores e nadar. Como eles fazem isso? Está tudo na balança. Conforme uma cobra se move, suas escamas agarram o solo e impulsionam o corpo para frente - semelhante a como os crampons ajudam os caminhantes a estabelecer apoios para os pés no gelo escorregadio. Essa chamada locomoção assistida por fricção é possível devido ao formato e ao posicionamento das escamas da cobra. p Agora, uma equipe de pesquisadores da Escola de Engenharia e Ciências Aplicadas de Harvard John A. Paulson (SEAS) desenvolveu um robô macio que usa os mesmos princípios de locomoção para rastejar sem quaisquer componentes rígidos. As escamas robóticas suaves são feitas usando kirigami - um antigo artesanato de papel japonês que depende de cortes, em vez de dobras de origami, para alterar as propriedades de um material. Conforme o robô se alonga, a superfície plana de kirigami é transformada em uma superfície com textura 3D, que agarra o solo como pele de cobra.
p A pesquisa é publicada em
Ciência Robótica .
p "Tem havido muita pesquisa nos últimos anos sobre como fabricar esses tipos de morfabilidade, estruturas extensíveis, "disse Ahmad Rafsanjani, um pós-doutorado na SEAS e primeiro autor do artigo. "Mostramos que os princípios do kirigami podem ser integrados em robôs suaves para alcançar a locomoção de uma forma mais simples, mais rápido e mais barato do que a maioria das técnicas anteriores. "
p Os pesquisadores começaram com um simples, folha plana de plástico. Usando um cortador a laser, eles incorporaram uma série de cortes em escala de centímetros, experimentando diferentes formas e tamanhos. Uma vez cortado, os pesquisadores enrolaram a folha em torno de um atuador de elastômero semelhante a um tubo, que se expande e se contrai com o ar como um balão.
Pesquisadores de Harvard desenvolveram um robô macio inspirado em cobras. O robô é feito com kirigami - uma antiga embarcação de papel japonesa que depende de cortes, em vez de dobras de origami, para alterar as propriedades de um material. Conforme o robô se alonga, a superfície plana de kirigami é transformada em uma superfície com textura 3D, que agarra o solo como pele de cobra. Crédito:Harvard SEAS p Quando o atuador se expande, o kirigami corta para fora, formando uma superfície áspera que agarra o solo. Quando o atuador esvazia, os cortes dobram, impulsionando o rastreador para a frente.
p Os pesquisadores construíram um robô totalmente livre, com seu controle integrado a bordo, de detecção, acionamento e fonte de alimentação embalados em uma cauda minúscula. Eles o testaram rastejando pelo campus de Harvard.
p A equipe experimentou cortes de vários formatos, incluindo triangular, circular e trapezoidal. Eles descobriram que cortes trapezoidais - que mais se assemelham ao formato de escamas de cobra - deram ao robô um passo mais longo.
 p Pesquisadores de Harvard construíram uma rede totalmente livre, robô macio bioinspirado, com controle integrado a bordo, de detecção, acionamento e fonte de alimentação embalados em uma cauda minúscula. Crédito:Ahmad Rafsanjani / Harvard SEAS
p Pesquisadores de Harvard construíram uma rede totalmente livre, robô macio bioinspirado, com controle integrado a bordo, de detecção, acionamento e fonte de alimentação embalados em uma cauda minúscula. Crédito:Ahmad Rafsanjani / Harvard SEAS
p "Mostramos que as propriedades locomotivas dessas películas de kirigami podem ser aproveitadas equilibrando-se adequadamente a geometria de corte e o protocolo de atuação, "disse Rafsanjani." Seguindo em frente, esses componentes podem ser otimizados ainda mais para melhorar a resposta do sistema. "
p "Acreditamos que nossa estratégia baseada em kirigami abre caminhos para o design de uma nova classe de rastreadores macios, "disse Katia Bertoldi, William e Ami Kuan Danoff, Professor de Mecânica Aplicada e autor sênior do artigo. "Esses robôs soft todo-o-terreno podem um dia viajar por ambientes difíceis para exploração, inspeção, monitorar e missões de busca e resgate ou realizar missões complexas, procedimentos médicos laparoscópicos. "