Pequeno robô macio pode se dividir em pedaços menores e depois remontar após a passagem por pequenos espaços
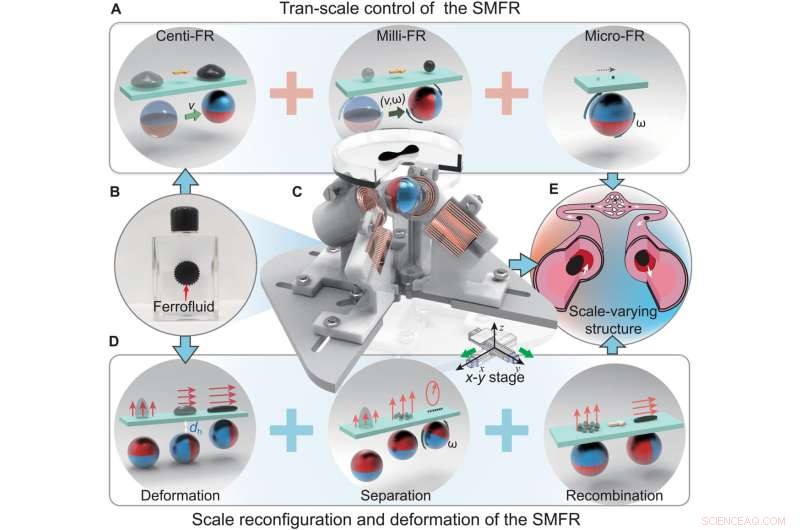
Visão geral da manobra trans-escala e estratégias de reconfiguração de escala dos robôs ferrofluídicos miniatura reconfiguráveis em escala (SMFRs). (A) Controle trans-escala do SMFR:locomoção do centi-FR, milli-FR e micro-FR com base no gradiente magnético, gradiente magnético e torque, e apenas torque magnético, respectivamente. (B) Comportamentos de resposta de gotículas de ferrofluido em campos magnéticos. (C) O SMFR é manipulado por um sistema de atuação magnética personalizado (o sistema M3RA) composto por quatro eletroímãs, um ímã permanente esférico (SPM) e um estágio de translação motorizado. Para observar facilmente a composição interna do sistema, ocultamos um quarto da estrutura. (D) Deformação e reconfiguração de escala do SMFR:deformação por estiramento, redução de escala por separação e aumento de escala por recombinação. A seta vermelha representa a direção de polarização do campo magnético. (E) Cenário de aplicação típico do SMFR baseado na combinação das capacidades acima:locomoção em um espaço nitidamente variável, como a rede vascular. Crédito:Avanços Científicos (2022). DOI:10.1126/sciadv.abq1677
Uma equipe de pesquisadores da Soochow University, trabalhando com dois colegas do Max Planck Institute for Intelligent Systems e outro do Harbin Institute of Technology, desenvolveu um tipo de robô macio que pode ser dividido em componentes menores para passar por pequenos espaços e depois remontar. Em seu artigo publicado na revista
Science Advances , o grupo descreve como eles fizeram seus pequenos robôs e sugere possíveis usos para eles.
À medida que a ciência da robótica continua a amadurecer, engenheiros de todo o mundo continuam a encontrar novas maneiras de fazê-los. Nesse novo esforço, os pesquisadores fizeram o seu a partir de um ferrofluido (nanopartículas magnéticas de óxido de ferro) que suspenderam em um óleo transparente. O robô é controlado usando ímãs externos.
O uso de um robô feito de um material que é apenas muito frouxamente unido, observam os pesquisadores, permite a alteração de sua forma sob demanda. Ao aplicar vários campos magnéticos, eles mostraram que era possível direcionar seu robô através de um labirinto, às vezes mudando sua forma para superar obstáculos. Eles a forçaram a se alongar, por exemplo, para se espremer por uma passagem estreita. Eles também o quebraram em um número desejado de partes menores para passar por um material poroso. Em ambos os casos, o robô foi facilmente remontado em uma única forma redonda de robô e continuou sua jornada. Eles observam que esse robô pode ser feito em uma ampla variedade de tamanhos.
Crédito:Xinjian Fan et al, Avanços na ciência (2022). DOI:10.1126/sciadv.abq1677 O robô poderia ser usado em aplicações médicas como meio de transportar drogas para partes do corpo de difícil acesso, como nódulos pulmonares ou partes do cérebro. Os pesquisadores reconhecem que, para aplicações práticas, o projeto teria que superar muitos obstáculos, mais obviamente, o desenvolvimento de um sistema de controle magnético que possa penetrar com precisão em ossos como o crânio. Enquanto isso, outros notaram que esse sistema robótico pode ser útil em dispositivos de laboratório em um chip, onde processos químicos são realizados para tarefas como detecção de vírus. Os minúsculos novos robôs talvez pudessem ser usados para transportar os produtos químicos necessários para as reações.
+ Explorar mais Slime magnético reconfigurável em tempo real usado como robô
© 2022 Science X Network