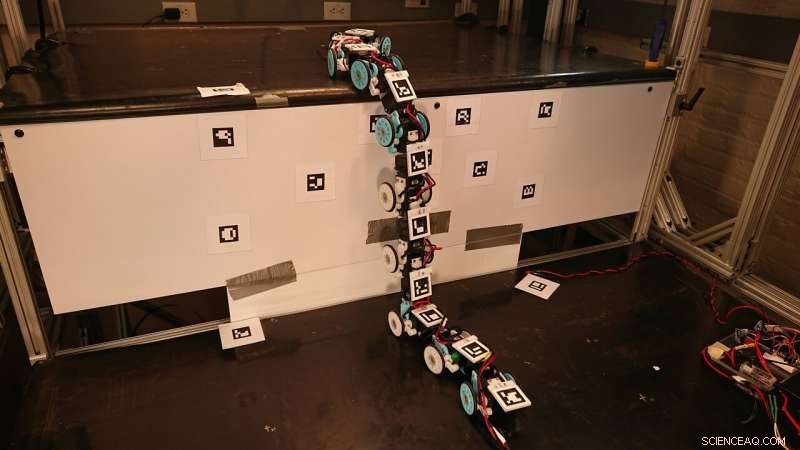
O Laboratório Terradynamics da Universidade Johns Hopkins criou este robô cobra para imitar sua contraparte animal. Crédito:JHU / Will Kirk
As cobras vivem em diversos ambientes, desde desertos insuportavelmente quentes a exuberantes florestas tropicais, onde eles escorregam em árvores, pedras e arbustos todos os dias. Ao estudar como essas serpentes se movem, Os engenheiros da Johns Hopkins criaram um robô cobra que pode escalar grandes degraus com agilidade e estabilidade.
As novas descobertas da equipe, publicado em Journal of Experimental Biology e Royal Society Open Science , Avançar na criação de robôs de busca e resgate que podem navegar com sucesso em terrenos traiçoeiros.
"Olhamos para essas criaturas assustadoras em busca de inspiração de movimento, porque eles já são muito hábeis em escalar obstáculos de forma estável em suas vidas diárias. Esperamos que nosso robô possa aprender a balançar e tecer em superfícies como cobras, "diz Chen Li, professor assistente de engenharia mecânica na Universidade Johns Hopkins e autor sênior dos artigos.
Estudos anteriores observaram principalmente movimentos de cobras em superfícies planas, mas raramente em terreno 3-D, exceto em árvores, disse Li, e não leve em consideração os grandes obstáculos da vida real, como entulho e entulho que os robôs de busca e resgate teriam que escalar.
A equipe de Li primeiro estudou como a variável kingsnake, uma cobra que pode ser comumente encontrada vivendo tanto em desertos quanto em florestas de pinheiros e carvalhos, escalou degraus no Laboratório de Terradynamics de Li. O laboratório de Li funde os campos da robótica, biologia e física juntos para estudar os movimentos dos animais para obter dicas e truques para construir robôs mais versáteis.
"Essas cobras precisam viajar regularmente por pedras e árvores caídas; elas são as mestras do movimento e há muito que podemos aprender com elas, "diz Li.
Li e sua equipe realizaram uma série de experimentos, alterar a altura do degrau e o atrito superficial dos degraus para observar como as cobras contorciam seus corpos em resposta a essas barreiras.
Eles descobriram que as cobras dividiam seus corpos em três seções:a frente e a traseira do corpo se contorciam para frente e para trás nos degraus horizontais como uma onda, enquanto a seção do meio do corpo permanecia rígida, pairando assim, para transpor o grande degrau. As porções que se contorcem, eles notaram, forneceu estabilidade para evitar que a cobra tombasse.
Conforme as cobras se aproximavam e subiam no degrau, as três seções do corpo percorreram cada segmento do corpo. À medida que mais e mais cobra chegava ao degrau, a seção dianteira da carroceria ficaria mais longa e a seção traseira mais curta, enquanto a seção intermediária da carroceria permaneceria aproximadamente com o mesmo comprimento, suspenso verticalmente acima dos dois degraus.
Se os degraus ficarem mais altos e mais escorregadios, as cobras se moviam mais lentamente e se contorciam menos na frente e atrás para manter a estabilidade.
Depois de analisar seus vídeos e observar como as cobras subiram degraus no laboratório, Qiyuan Fu, um estudante de graduação no laboratório de Li, criou um robô para imitar os movimentos dos animais.
Inicialmente, a cobra robô tinha dificuldade em se manter estável em degraus grandes e muitas vezes cambaleava e capotava ou ficava presa nos degraus. Para resolver esses problemas, os pesquisadores inseriram um sistema de suspensão (como o do seu carro) em cada segmento do corpo para que pudesse ser comprimido contra a superfície quando necessário. Depois disto, o robô cobra era menos vacilante, mais estável e escalou degraus de até 38% do comprimento do corpo com uma taxa de sucesso de quase 100%.
Em comparação com robôs cobra de outros estudos, O robô cobra de Li era mais rápido e mais estável do que todos, exceto um, e até chegou perto de imitar a velocidade real da cobra. Uma desvantagem do sistema de suspensão da carroceria adicionado, Contudo, foi o robô que usou mais eletricidade.
“O animal ainda é muito mais superior, mas esses resultados são promissores para o campo de robôs que podem viajar através de grandes obstáculos, "acrescenta Li.
Próximo, a equipe testará e aprimorará o robô cobra para terrenos 3-D ainda mais complexos, com obstáculos grandes mais não estruturados.