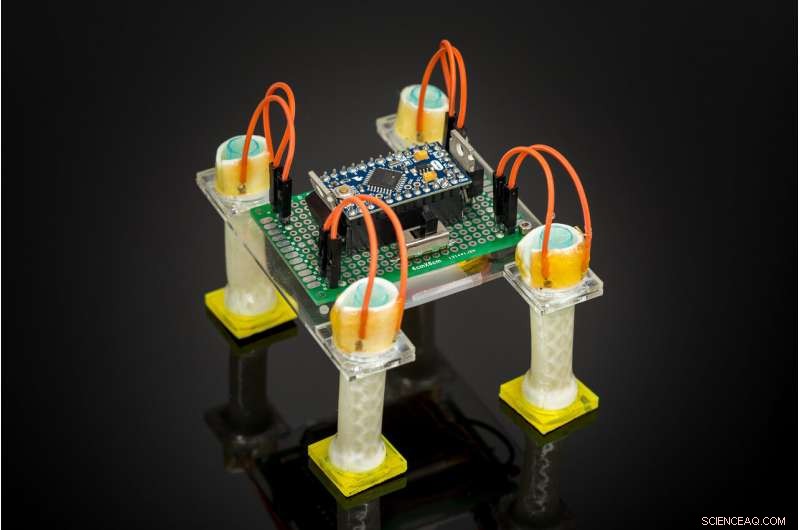
 p Controlado eletricamente, robô macio sem amarras construído com quatro atuadores tubulares flexíveis, um microcontrolador e bateria. O robô pode ser programado para andar ou carregar um objeto. Crédito:David Baillot / Escola de Engenharia da UC San Diego Jacobs
p Controlado eletricamente, robô macio sem amarras construído com quatro atuadores tubulares flexíveis, um microcontrolador e bateria. O robô pode ser programado para andar ou carregar um objeto. Crédito:David Baillot / Escola de Engenharia da UC San Diego Jacobs
p Engenheiros da Universidade da Califórnia em San Diego desenvolveram uma maneira de construir robôs leves que são compactos, portátil e multifuncional. O avanço foi possível criando soft, atuadores tubulares cujos movimentos são controlados eletricamente, tornando-os fáceis de integrar com pequenos componentes eletrônicos. p Como prova de conceito, engenheiros usaram esses novos atuadores para construir um sistema robô movido a bateria que pode andar sem amarras em superfícies planas e mover objetos. Eles também construíram uma pinça macia que pode agarrar e pegar pequenos objetos.
p O time, liderado pelo professor de engenharia mecânica e aeroespacial da UC San Diego, Shengqiang Cai, publicou o trabalho em 11 de outubro em
Avanços da Ciência .
p Um problema com a maioria dos atuadores macios é que eles vêm com configurações volumosas. Isso porque seus movimentos são controlados pelo bombeamento de ar ou fluidos através de câmaras internas. Portanto, construir robôs com esses tipos de atuadores exigiria amarrá-los a bombas, grandes fontes de energia e outros equipamentos especializados.
p No estudo atual, Os engenheiros da UC San Diego criaram atuadores macios que são controlados com eletricidade. "Este recurso torna nossos atuadores tubulares compatíveis com a maioria dos de baixo custo, dispositivos eletrônicos e baterias disponíveis comercialmente, "Cai disse.
Vídeo de controlado eletricamente, atuadores tubulares macios usados em dispositivos robóticos macios. Crédito:Qiguang He p Os atuadores são feitos de um tipo de material usado para músculos artificiais em robôs, chamados elastômeros de cristal líquido. Eles são compostos de moléculas de cristal líquido embutidas em uma rede polimérica elástica. O que é especial sobre esses materiais é que eles mudam de forma, movem-se e contraem-se em resposta a estímulos como calor ou eletricidade - semelhante a como os músculos se contraem em resposta aos sinais das células nervosas.
p Para construir cada atuador, engenheiros imprensaram três fios de aquecimento entre duas películas finas de elastômero de cristal líquido. O material é então enrolado em um tubo, pré-esticado e exposto à luz ultravioleta.
p Cada fio de aquecimento pode ser controlado de forma independente para fazer o tubo curvar em seis direções diferentes. Quando uma corrente elétrica passa por um ou dois dos fios, ele aquece parte do tubo e o faz dobrar na direção daqueles fios. Quando uma corrente é enviada por todos os três fios, todo o tubo se contrai, encurtando em comprimento. Quando a eletricidade é desligada, o tubo esfria lentamente e retorna à sua forma original.
 p Controlado eletricamente, robô macio sem amarras construído com quatro atuadores tubulares flexíveis, um microcontrolador e bateria. O robô pode ser programado para andar ou carregar um objeto. Crédito:David Baillot / Escola de Engenharia da UC San Diego Jacobs
p Controlado eletricamente, robô macio sem amarras construído com quatro atuadores tubulares flexíveis, um microcontrolador e bateria. O robô pode ser programado para andar ou carregar um objeto. Crédito:David Baillot / Escola de Engenharia da UC San Diego Jacobs
p "O uso de um potencial elétrico aplicado externamente torna mais fácil programar a posição de cada atuador tubular, "disse o primeiro autor Qiguang He, um Ph.D. em engenharia mecânica e aeroespacial. estudante da Escola de Engenharia da UC San Diego Jacobs.
p A combinação de vários atuadores permitiu que os engenheiros construíssem diferentes tipos de robôs soft. Eles construíram uma rede sem amarras, robô ambulante usando quatro atuadores como pernas. Este robô é alimentado por uma pequena bateria de lítio / polímero a bordo. Eles também construíram uma pinça macia usando três atuadores como dedos.
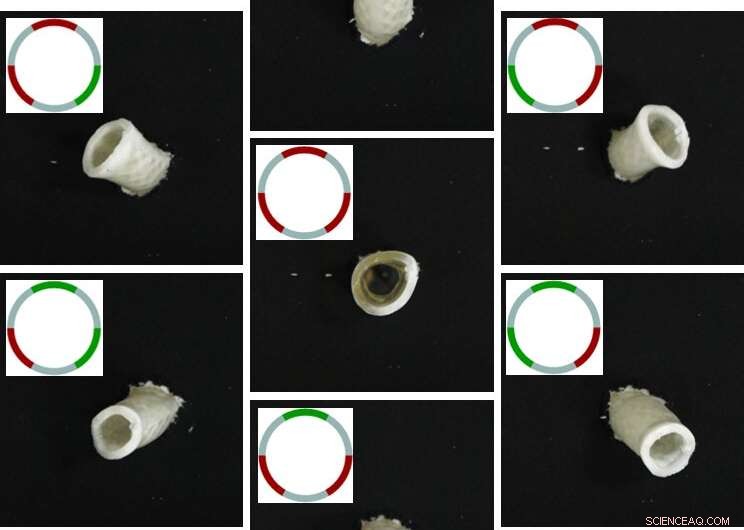 p Dependendo de quais fios de aquecimento são ativados eletricamente (vermelho), o atuador tubular macio pode dobrar em seis direções diferentes (imagens externas) e contrair em comprimento (imagem central). Crédito:Qiguang He
p Dependendo de quais fios de aquecimento são ativados eletricamente (vermelho), o atuador tubular macio pode dobrar em seis direções diferentes (imagens externas) e contrair em comprimento (imagem central). Crédito:Qiguang He
p Cada robô possui um microcontrolador integrado no qual os engenheiros programaram uma sequência de movimentos controlados eletricamente para os atuadores. Isso permite que os robôs se movam de forma independente.
p A equipe agora está trabalhando para fazer atuadores macios que podem se mover mais rápido. Os atuadores atuais levam cerca de 30 segundos para dobrar e contrair totalmente, e até quatro minutos para retornar às suas formas originais. Isso porque o material leva um pouco de tempo para aquecer e resfriar totalmente. O objetivo final é fazer atuadores que possam se contrair e relaxar tão rapidamente quanto os músculos humanos, Ele disse.