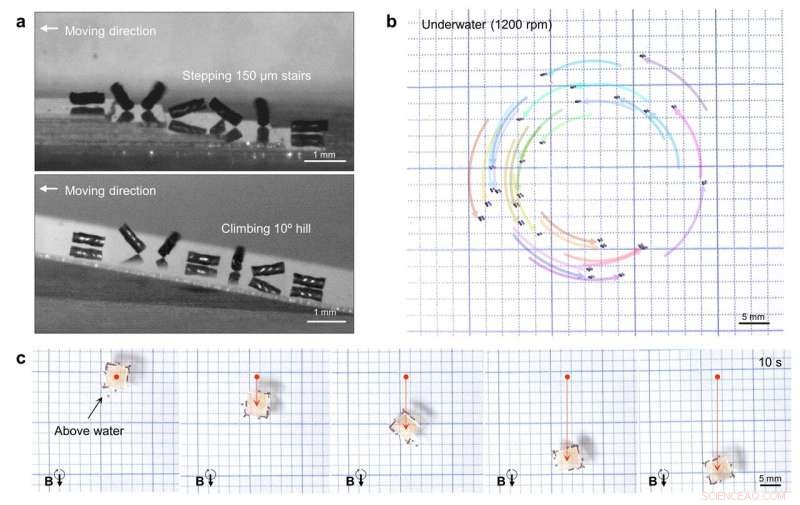
A magnetomotilidade hierárquica impulsionada por movimentos rotacionais e giratórios de robôs moles magnéticos helicoidais permite (a) escalar obstáculos, (b) natação subaquática de vários robôs soft, e (c) transporte coletivo de carga por meio de um único eixo rotativo de ímãs permanentes. Crédito:Inha University
Robôs magnéticos macios são uma opção promissora para controle sem contato em ambientes confinados por meio de estímulos magnéticos externos. Movimentos magnéticos induzidos, ou seja, magnetomotilidade, são impulsionados pela deformação local de um robô por meio do qual alinhamentos de partículas e distribuições polares alternadas são programados no corpo. As tentativas de programar a anisotropia magnética nos robôs macios foram realizadas por meio de impressão direta a laser (DLP), estereolitografia (SLA) e fabricação de filamento fundido (FDM) combinada com manipulação multiaxial de eletroímãs.
Agora, pesquisadores demonstraram métodos fáceis de preparação e atuação de robôs macios magnéticos sem regulação eletromagnética. Eles construíram um robô helicoidal macio tridimensional por meio da torção de um filme composto de polímero bidimensional. Nanocompósitos termoplásticos de poliuretano-magnetita permitiram super-torção dos filmes devido ao alto alongamento; o uso de materiais termoplásticos também permitiu que a arquitetura torcida se tornasse fixa termicamente. O denso corpo helicoidal de robôs macios magnéticos permitiu a magnetomotilidade hierárquica, incluindo rotações no sentido horário e no sentido anti-horário resultantes de dois ímãs permanentes com um único eixo de rotação girando no sentido horário sob os substratos.
Na manipulação magnética de vários robôs soft, o controle do robô individual permanece uma manobra intrincada, uma vez que a respectiva trajetória de cada robô é simultaneamente coordenada ao longo de diferentes caminhos. A operação sem bateria desses vários robôs macios magnéticos foi realizada por meio de variações nas frequências dos ímãs rotativos no plano, à medida que robôs macios com diferentes relações de aspecto eram acionados com outros modos de rotação - rotativos, girando, e caindo - mesmo em velocidade de rotação idêntica. Além da manobra orbital dos raios, velocidades, e caminhos de vários robôs soft, locomoção ágil de até 60 comprimentos corporais s-1 e magnetomotilidade hierárquica ajudaram os robôs macios a escalar obstáculos como escadas, colinas e superfícies enrugadas sob uma fonte magnética em rotação perpétua e sem a regulação multidirecional de campos magnéticos.
Os pesquisadores também demonstraram cooperação entre vários robôs macios magnéticos inspirados na qualidade coletiva do transporte de carga em colônias de formigas. O comportamento coletivo é uma observação comum na natureza com exemplos encontrados na migração celular, colônias de formigas, e cardumes de peixes, para nomear alguns. Contudo, é difícil conseguir esse projeto em robôs coletivos porque a dinâmica dos movimentos robóticos individuais e coletivos precisa ser otimizada a partir de análises computacionais e experimentais. Esses requisitos tornam-se desnecessários no presente estudo, como forças capilares agem para prender os robôs macios giratórios e giratórios ao redor da carga. A realocação dos ímãs embaixo dos robôs resulta em transporte facilitado de objetos pesados semelhante ao comportamento de trabalho das formigas.
Essas novas técnicas de manobra orbital sob demanda por meio de magnetomotilidade hierárquica podem ser expandidas para aplicações biomédicas onde nadadores magnéticos miniaturizados podem potencialmente entregar drogas em espaços com configurações complexas.