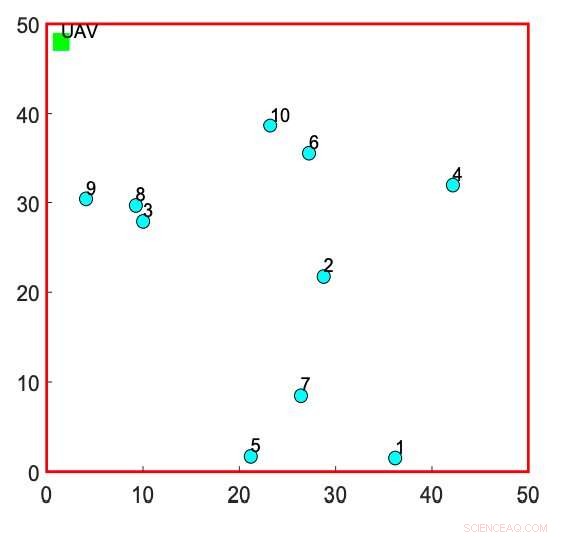
Imagem que descreve um sistema de coordenadas cartesianas bidimensional, onde o UAV está localizado na estação terrestre e as UGs estão localizadas na área considerada. Crédito:Tran et al.
Uma equipe de pesquisadores da Universidade de Luxemburgo e da Ontario Tech University propôs recentemente uma nova abordagem para projetar trajetórias para comunicações sem fio habilitadas por veículos aéreos não tripulados (UAV) com eficiência energética. Seu papel, pré-publicado no arXiv, concentra-se especificamente em casos em que um UAV atua como uma estação base voadora (BS) para servir os usuários terrestres (GSs) dentro de algumas restrições de latência predeterminadas.
"Nosso objetivo é projetar a trajetória do UAV para minimizar o consumo total de energia, ao mesmo tempo que satisfaz os requisitos de RT e o orçamento de energia, o que é realizado por meio da otimização conjunta da trajetória e das velocidades do UAV ao longo dos saltos subsequentes, "escreveram os pesquisadores em seu artigo.
Otimizar a trajetória de um UAV e suas velocidades juntas pode ser um tanto difícil de conseguir. Para fazer isso, os pesquisadores desenvolveram uma abordagem que realiza duas etapas consecutivas.
Sua abordagem envolve o uso de dois algoritmos distintos, uma pesquisa heurística e um algoritmo de programação dinâmica (DP). Os métodos de pesquisa heurística funcionam avaliando todas as informações disponíveis em cada etapa e decidindo que caminho seguir pelas opções de classificação disponíveis.
Programaçao dinamica, por outro lado, é uma abordagem para resolver problemas com 'subproblemas sobrepostos. "Funciona abordando subproblemas individuais apenas uma vez e salvando os resultados dessas análises, para usá-los novamente se o mesmo subproblema for encontrado no futuro.
Os pesquisadores usaram sua busca heurística e algoritmos de programação dinâmica para obter um conjunto viável de trajetórias para UAVs que não violassem as restrições de latência do usuário terrestre. A tarefa de encontrar essas trajetórias é resolvida como se fosse o chamado problema do caixeiro viajante com janelas de tempo (TSPTW). TSPTW é um problema algorítmico usado em ciência da computação que envolve encontrar um caminho de custo mínimo para um vendedor que deseja viajar e visitar cada uma de um conjunto de cidades exatamente uma vez dentro de uma janela de tempo específica.
As trajetórias sugeridas pelos algoritmos foram posteriormente comparadas àquelas alcançadas por meio de técnicas exaustivas de busca e ao abordar a tarefa como o problema do caixeiro viajante (TSP); um problema algorítmico em que é necessário encontrar as rotas ideais para um vendedor que deseja visitar um conjunto específico de cidades sem quaisquer requisitos de tempo específicos.
"Embora o algoritmo exaustivo alcance o melhor desempenho com um alto custo de computação, o algoritmo heurístico exibe pior desempenho com baixa complexidade, "os pesquisadores explicaram em seu artigo." Como resultado, o DP é proposto como um trade-off prático entre os algoritmos exaustivo e heurístico. "
Além dos dois algoritmos para encontrar trajetórias UAV ideais, os pesquisadores também propuseram uma técnica para minimização de energia. Este método funciona otimizando conjuntamente as velocidades do UAV e os saltos subsequentes.
Quando os pesquisadores avaliaram seus algoritmos, descobriram que eles são altamente eficazes, superando as técnicas de última geração existentes, tanto em termos de consumo de energia quanto de desempenho em interrupções. No futuro, a nova abordagem que eles propuseram pode ajudar a projetar melhores trajetórias para a minimização de energia em aplicações que envolvem comunicações sem fio habilitadas por UAV com restrições de latência. Além disso, seu trabalho pode abrir caminho para estudos futuros voltados para o desenvolvimento de novas ferramentas para melhorar o desempenho das redes de comunicação de UAV.
© 2019 Science X Network