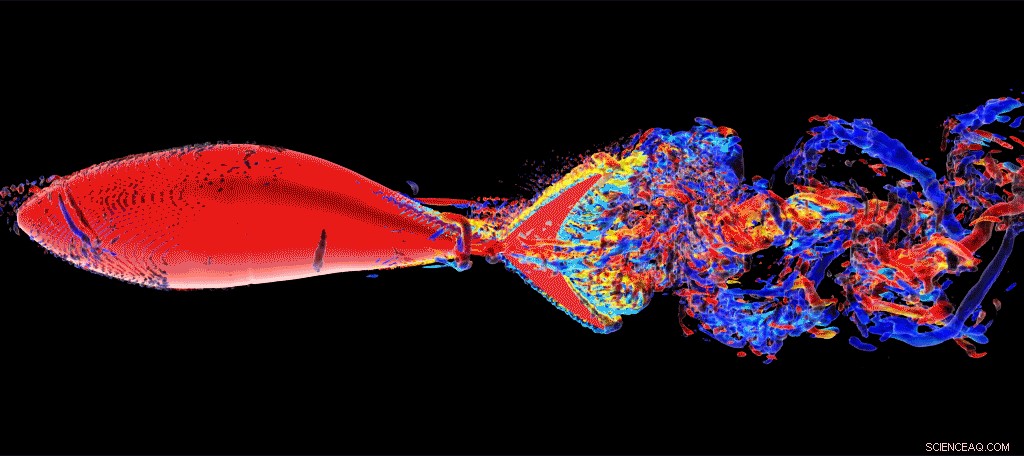
Desenvolvimento de uma plataforma experimental de alta frequência explorando o espaço de atuação de peixes nadadores. Crédito:Haibo Dong
Engenheiros mecânicos da Escola de Engenharia da Universidade da Virgínia, liderando uma colaboração com biólogos da Universidade de Harvard, criaram os primeiros peixes robóticos que comprovadamente imitam a velocidade e os movimentos do atum albacora vivo.
Seu artigo revisado por pares, "Robótica do atum:uma plataforma experimental de alta frequência que explora o espaço de atuação de peixes nadadores, "foi publicado em 18 de setembro, 2019, no Ciência Robótica .
Liderado por Hilary Bart-Smith, professor do Departamento de Engenharia Mecânica e Aeroespacial da UVA Engineering, o projeto do atum robótico nasceu de um período de cinco anos, A Iniciativa de Pesquisa Universitária Multidisciplinar de US $ 7,2 milhões do U.S. Office of Naval Research concedeu a Bart-Smith um estudo rápido, natação eficiente de peixes diferentes. O objetivo do projeto de Bart-Smith é compreender melhor a física da propulsão dos peixes, pesquisa que poderia eventualmente informar o desenvolvimento da próxima geração de veículos subaquáticos, impulsionado por sistemas semelhantes a peixes melhores do que hélices.
Os robôs subaquáticos também são úteis em uma variedade de aplicações, como defesa, exploração de recursos marinhos, inspeção de infraestrutura e recreação.
Bem antes de os sistemas de propulsão bioinspirados se tornarem viáveis para uso público e comercial em veículos tripulados e não tripulados, Contudo, os pesquisadores devem ser capazes de compreender com segurança como os peixes e outras criaturas se movem na água.
"Nosso objetivo não era apenas construir um robô. Realmente queríamos entender a ciência da natação biológica, "Bart-Smith disse." Nosso objetivo era construir algo em que pudéssemos testar hipóteses em termos do que torna os nadadores biológicos tão rápidos e eficientes. "
A equipe primeiro precisava estudar a mecânica biológica de nadadores de alto desempenho. O professor de biologia de Harvard, George V. Lauder, e sua equipe de pesquisadores mediram com precisão a dinâmica de natação do atum albacora e da cavala. Usando esses dados, Bart-Smith e sua equipe, o cientista pesquisador Jianzhong "Joe" Zhu e Ph.D. estudante Carl White, construiu um robô que não apenas se movia como um peixe debaixo d'água, mas batia o rabo rápido o suficiente para atingir velocidades quase equivalentes.
Eles então compararam o robô que chamaram de "Tunabot" com espécimes vivos.
"Existem muitos artigos sobre robôs peixes, mas a maioria deles não tem muitos dados biológicos neles. Portanto, acho que este artigo é único na qualidade do trabalho robótico e dos dados biológicos combinados em um único artigo, "Lauder disse.
“O que é tão fantástico com os resultados que apresentamos no artigo são as semelhanças entre a biologia e a plataforma robótica, não apenas em termos de cinemática de natação, mas também em termos da relação entre velocidade e frequência de batimento traseiro e desempenho de energia, "Bart-Smith disse." Essas comparações nos dão confiança em nossa plataforma e sua capacidade de nos ajudar a entender mais sobre a física da natação biológica. "
O trabalho da equipe se baseia nos pontos fortes da UVA Engineering em sistemas autônomos. O Departamento de Engenharia Mecânica e Aeroespacial é participante do Link Lab da UVA Engineering para sistemas ciber-físicos, que se concentra em cidades inteligentes, saúde inteligente e sistemas autônomos, incluindo veículos autônomos.
O projeto Tunabot é uma conseqüência do segundo projeto de Bart-Smith, Iniciativa de Pesquisa Universitária Multi-disciplinar altamente competitiva do Office of Naval Research; Em 2008, Bart-Smith recebeu um prêmio de US $ 6,5 milhões para desenvolver um robô subaquático modelado em uma arraia-manta.
Os testes do Tunabot ocorrem em um grande laboratório no Edifício de Engenharia Mecânica e Aeroespacial da UVA Engenharia, em um tanque de fluxo que ocupa cerca de um quarto da sala, e na Universidade de Harvard em uma instalação semelhante. Os sem olhos, réplicas de peixes sem barbatanas têm cerca de 25 centímetros de comprimento; o equivalente biológico pode chegar a 2,10 metros de comprimento. Uma corda de pesca mantém o robô estável, enquanto uma luz laser verde corta a linha média do peixe de plástico. O laser mede o movimento do fluido liberado pelo robô a cada movimento de sua cauda fabricada. À medida que a corrente de água no tanque de fluxo acelera, a cauda e todo o corpo do Tunabot se movem em um padrão de flexão rápida, semelhante à forma como um atum albacora vivo nada.
"Vemos na literatura de robótica de peixes até agora que existem sistemas realmente excelentes que outros fizeram, mas os dados costumam ser inconsistentes em termos de seleção e apresentação de medidas. É apenas o estado atual do campo da robótica no momento. Nosso artigo sobre o Tunabot é significativo porque nossos dados de desempenho abrangentes definem um padrão muito alto, "White disse.
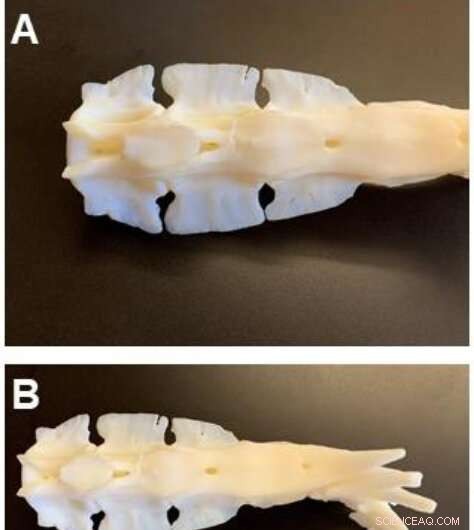
Impressões 3D do esqueleto do pedúnculo caudal (a área onde a barbatana caudal se liga) em um albacora. Crédito:Zhu et al., Sci. Robô. 4, eaax4615 (2019)
A relação entre biologia e robótica é circular, Lauder disse. "Um dos motivos pelos quais acho que temos um programa de pesquisa bem-sucedido nessa área é a grande interação entre biólogos e roboticistas." Cada descoberta em um ramo informa o outro, um tipo de ciclo de feedback educacional que está constantemente avançando tanto a ciência quanto a engenharia.
"Não presumimos que a biologia evoluiu para a melhor solução, "Bart-Smith disse." Esses peixes tiveram muito tempo para evoluir para uma solução que lhes permite sobreviver, especificamente, comer, reproduzir e não ser comido. Não restringido por esses requisitos, podemos nos concentrar exclusivamente em mecanismos e recursos que promovem um melhor desempenho, maior velocidade, maior eficiência. Nosso objetivo final é superar a biologia. Como podemos construir algo que se parece com biologia, mas nada mais rápido do que qualquer coisa que você vê lá fora no oceano? "