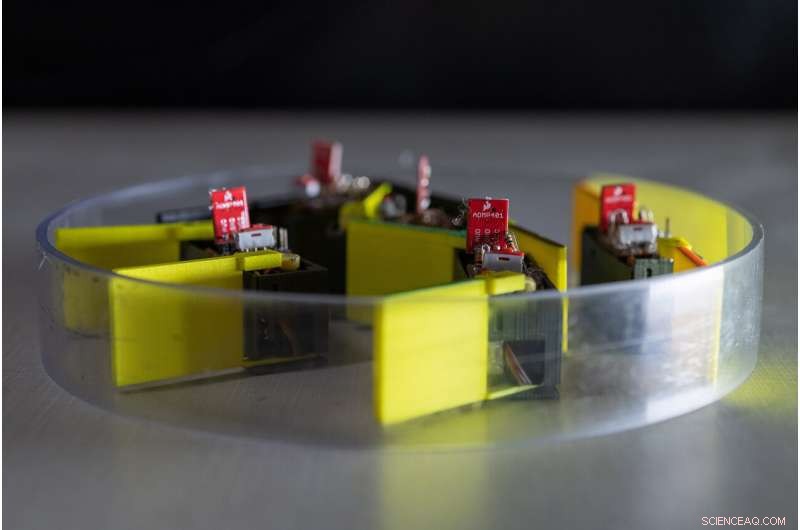
Cinco "smarticles" idênticos - partículas ativas inteligentes - interagem entre si em um invólucro. Cutucando uns aos outros, o grupo - apelidado de "superartigo" - pode se mover de maneira aleatória. Crédito:Georgia Tech, Rob Felt
Construir robôs convencionais normalmente requer a combinação cuidadosa de componentes como motores, baterias, atuadores, segmentos corporais, pernas e rodas. Agora, pesquisadores adotaram uma nova abordagem, construir um robô inteiramente com robôs menores conhecidos como "smarticles" para desvendar os princípios de uma técnica de locomoção potencialmente nova.
Os smarticles impressos em 3D - abreviação de partículas ativas inteligentes - podem fazer apenas uma coisa:agitar seus dois braços. Mas quando cinco desses smarticles estão confinados em um círculo, eles começam a se cutucar, formando um sistema robofísico conhecido como "supersmarticle" que pode se mover por si mesmo. Adicionar um sensor de luz ou som permite que a supersmarticle se mova em resposta ao estímulo - e até mesmo seja controlada bem o suficiente para navegar em um labirinto.
Embora rudimentar agora, a noção de fazer robôs a partir de robôs menores - e tirar proveito das capacidades de grupo que surgem pela combinação de indivíduos - pode fornecer controle baseado mecanicamente sobre robôs muito pequenos. Em última análise, o comportamento emergente do grupo poderia fornecer uma nova locomoção e abordagem de controle para pequenos robôs que poderiam mudar de forma.
"São robôs muito rudimentares, cujo comportamento é dominado pela mecânica e pelas leis da física, "disse Dan Goldman, um Dunn Family Professor na Escola de Física do Georgia Institute of Technology. "Não estamos procurando colocar um controle sofisticado, detecção e computação em todos eles. Conforme os robôs se tornam cada vez menores, teremos que usar a mecânica e os princípios da física para controlá-los, porque eles não terão o nível de computação e detecção que precisaríamos para o controle convencional. "
A pesquisa, que foi apoiado pelo Gabinete de Pesquisa do Exército e pela National Science Foundation, tem publicação prevista para 18 de setembro na revista Ciência Robótica . Pesquisadores da Northwestern University também contribuíram para o projeto.
A base para a pesquisa veio de uma fonte improvável:um estudo de itens básicos da construção. Derramando esses grampos pesados em um recipiente com laterais removíveis, ex-Ph.D. o aluno Nick Gravish - agora professor da Universidade da Califórnia em San Diego - criou estruturas que permaneceriam independentes após a remoção das paredes do contêiner.
Sacudir as torres de grampos acabou fazendo com que elas desabassem, mas as observações levaram à compreensão de que o simples emaranhado de objetos mecânicos poderia criar estruturas com capacidades muito além das dos componentes individuais.
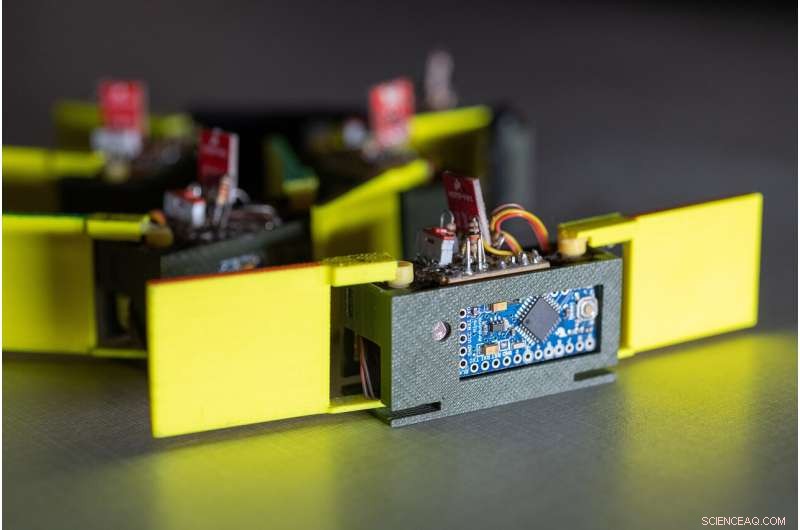
Close de um "smarticle" - partícula ativa inteligente - mostrando os dois braços impressos em 3D, sensor de luz e motor. Crédito:Georgia Tech, Rob Felt
"Um robô feito de outros robôs rudimentares tornou-se a visão, "Goldman disse." Você poderia imaginar fazer um robô em que você ajustaria um pouco seus parâmetros geométricos e o que surgiria são comportamentos qualitativamente novos. "
Para explorar o conceito, o assistente de pesquisa de pós-graduação Will Savoie usou uma impressora 3-D para criar dispositivos inteligentes alimentados por bateria, que tem motores, sensores simples e poder de computação limitado. Os dispositivos podem mudar de localização apenas quando interagem uns com os outros dispositivos enquanto cercados por um anel.
"Mesmo que nenhum robô individual pudesse se mover por conta própria, a nuvem composta por vários robôs pode se mover conforme se separa e encolher conforme se recompõe, "Goldman explicou." Se você colocar um anel em torno da nuvem de pequenos robôs, eles começam a se chutar e o anel maior - o que chamamos de supermarticle - se move aleatoriamente. "
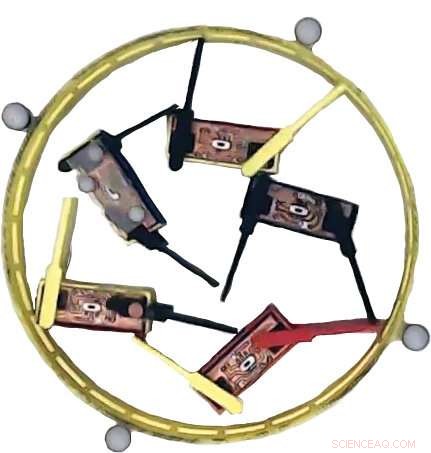
Um superartigo. Crédito:Savoie et al., Sci. Robô. 4, eaax4316 (2019)
Os pesquisadores notaram que se um pequeno robô parasse de se mover, talvez porque sua bateria morreu, o grupo de smarticles começaria a se mover na direção daquele robô estagnado. O aluno de graduação Ross Warkentin aprendeu a controlar o movimento adicionando sensores fotográficos aos robôs que impedem o movimento do braço quando um forte feixe de luz atinge um deles.
"Se você inclinar a lanterna para a direita, você pode destacar o robô que deseja que fique inativo, e isso faz com que o anel se mova para perto ou para longe dele, mesmo que nenhum robô esteja programado para se mover em direção à luz, "Goldman disse." Isso permitiu dirigir o conjunto de uma forma muito rudimentar, forma estocástica. "
O professor Kurt Wiesenfeld da Escola de Física e o estudante graduado Zack Jackson modelaram o movimento desses smarticles e supersmarticles para entender como os empurrões e a massa do anel afetavam o movimento geral. Pesquisadores da Northwestern University estudaram como as interações entre os smarticles forneciam controle direcional.
"For many robots, we have electrical current move motors that generate forces on parts that collectively move a robot reliably, " said Todd Murphey, a professor of mechanical engineering who worked with Northwestern graduate students Thomas Berrueta and Ana Pervan. "We learned that although individual smarticles interact with each other through a chaos of wiggling impacts that are each unpredictable, the whole robot composed of those smarticles moves predictably and in a way that we can exploit in software."
Em trabalho futuro, Goldman envisions more complex interactions that utilize the simple sensing and movement capabilities of the smarticles. "People have been interested in making a certain kind of swarm robots that are composed of other robots, " he said. "These structures could be reconfigured on demand to meet specific needs by tweaking their geometry."
The project is of interest to the U.S. Army because it could lead to new robotic systems capable of changing their shapes, modalities and functions, said Sam Stanton, program manager, complex dynamics and systems at the Army Research Office, an element of U.S. Army Combat Capabilities Development Command's Army Research Laboratory.
"Future Army unmanned systems and networks of systems are imagined to be capable of transforming their shape, modality and function. Por exemplo, a robotic swarm may someday be capable of moving to a river and then autonomously forming a structure to span the gap, " he said. "Dan Goldman's research is identifying physical principles that may prove essential for engineering emergent behavior in future robot collectives as well as new understanding of fundamental trade-offs in system performance, responsiveness, uncertainty, resiliency and adaptivity."














