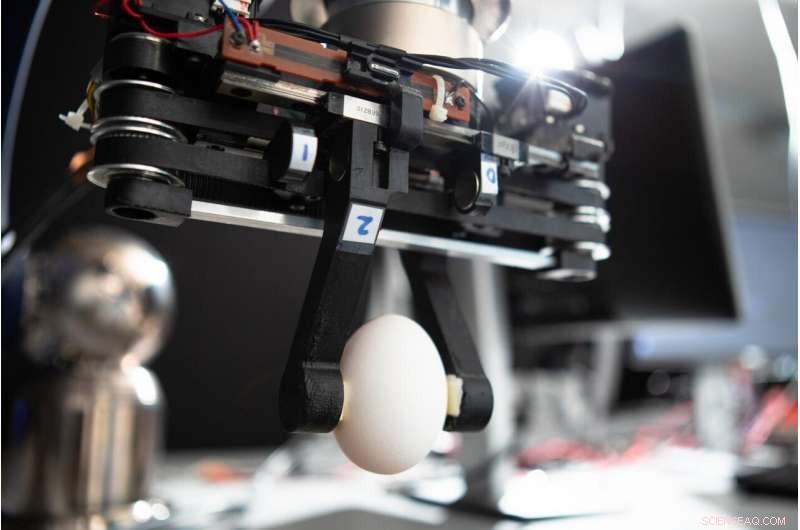
Uma pinça robótica desenvolvida no laboratório da Universidade de Buffalo, o engenheiro Ehsan Esfahani, usa a repulsão entre ímãs para ajustar a rigidez de sua empunhadura, melhorando a segurança. Crédito:Douglas Levere / University at Buffalo
As mãos humanas são notavelmente hábeis na manipulação de uma variedade de objetos. Podemos pegar um ovo ou morango sem esmagá-lo. Podemos pregar um prego.
Uma característica que nos permite realizar uma variedade de tarefas é a capacidade de alterar a firmeza de nossa pegada, e os engenheiros da University at Buffalo desenvolveram uma mão robótica com dois dedos que compartilha essa característica.
O design da mão robótica permite que ela absorva a energia dos impactos durante as colisões. Isso evita que o que quer que o robô esteja segurando se quebre, e também torna mais seguro para as pessoas trabalharem com e perto das máquinas.
Essas garras seriam um recurso valioso para a parceria humano-robô em linhas de montagem no setor automotivo, embalagem eletrônica e outras indústrias, diz Ehsan Esfahani, Ph.D., professor associado de engenharia mecânica e aeroespacial na Escola de Engenharia e Ciências Aplicadas da UB.
"Nossa garra robótica imita a capacidade da mão humana de ajustar a rigidez da garra. Essas garras são projetadas para robôs colaborativos que trabalham em conjunto com as pessoas, "Esfahani diz." Eles vão ser ajudantes, então eles precisam estar seguros, e garras de rigidez variável ajudam a atingir esse objetivo. "
Um novo estudo publicado online em 10 de setembro em Transações IEEE em Eletrônica Industrial destaca o design seguro do dispositivo, inclusive por meio de experimentos que mostram como os recursos de absorção de choque da pinça evitam que um espaguete se quebre durante uma colisão.
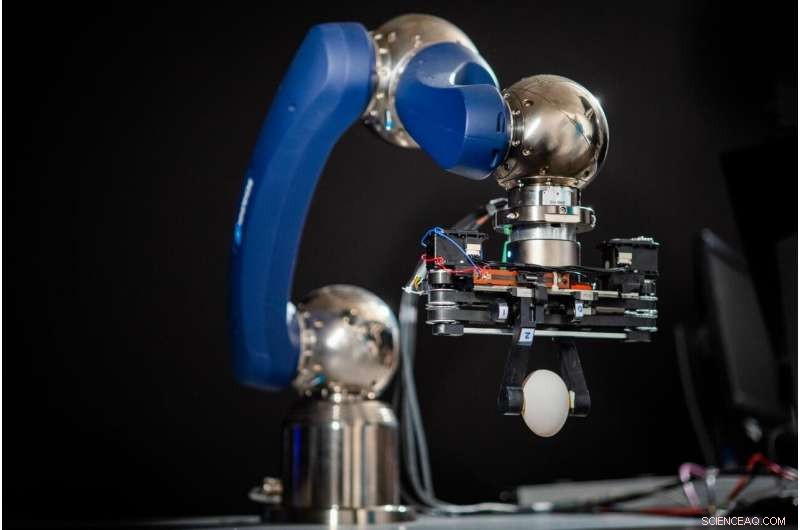
Uma pinça robótica desenvolvida no laboratório do engenheiro Ehsan Esfahani da Universidade de Buffalo. A pinça é presa a um braço de robô disponível comercialmente. Crédito:Douglas Levere / University at Buffalo
Os ímãs dão a este robô um toque suave
Esfahani explica que os ímãs são o segredo por trás da versatilidade da garra robótica.
Em vez de ter dois dedos fixos no lugar, cada um dos dedos da garra tem uma base magnética que fica entre dois ímãs de neodímio que se repelem, ou empurre contra, o dedo.
O espaço de ar entre os ímãs atua como uma mola, criando uma pequena flexão quando a mão pega um objeto ou colide com uma força externa. A rigidez da empunhadura também pode ser ajustada aumentando ou diminuindo o espaço entre os ímãs.
No novo jornal, Esfahani e Amirhossein Memar, um ex-UB Ph.D. candidato em engenharia mecânica e aeroespacial, relatório sobre esses recursos de segurança.
Em um conjunto de testes, os engenheiros colocaram um pequeno pedaço de espaguete longitudinalmente entre os dedos da mão robótica. Quando a garra bateu em um objeto fixo, o dispositivo detectou a força externa sendo aplicada, que fez com que os ímãs ajustassem sua posição, reduzindo temporariamente a rigidez da garra e permitindo que a garra absorva parte da energia da colisão.
O resultado final? O espaguete ficou inteiro.
Próximas etapas de desenvolvimento
Esfahani observa que a garra que sua equipe está desenvolvendo pode ser acoplada a braços de robô disponíveis comercialmente que já estão em uso em muitas instalações. Isso poderia reduzir o custo de adaptação da tecnologia para empresas interessadas em melhorar a segurança e os recursos das máquinas existentes.
Esfahani está lançando uma empresa iniciante para comercializar a garra, licenciamento de tecnologia da UB.
Sua equipe recebeu $ 55, 000 do Buffalo Fund:Accelerator - financiado pelo Innovation Hub, que é administrado pelo UB e apoiado pelo Empire State Development - para desenvolver ainda mais a mão robótica. Além de refinar o design atual da garra, a equipe também pode explorar avanços, como adicionar um terceiro dedo.
Os pesquisadores que estiveram envolvidos no projeto e teste da garra incluem Ph.D. estudante Sri Sadhan Jujjavarapu e Memar, o co-autor do estudo do novo bastão de espaguete, que recebeu seu Ph.D. da UB e agora é um cientista de pesquisa pós-doutorado no Facebook Reality Labs.