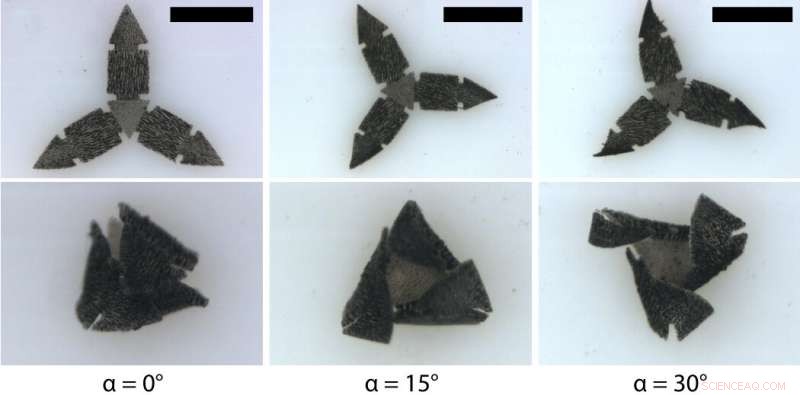
Imagens de vista superior das estruturas magnéticas macias de três braços que apresentam diferentes perfis de magnetização. Crédito:Xu et al., Sci. Robô. 4, eaav4494 (2019)
A montagem de um microrrobô costumava exigir um par de pinças com ponta de agulha, um microscópio, mãos firmes e pelo menos oito horas. Mas agora os pesquisadores de engenharia da Universidade de Toronto desenvolveram um método que requer apenas uma impressora 3-D e 20 minutos.
No laboratório do Professor Eric Diller, pesquisadores criam microrrobôs magnetizados - do tamanho da cabeça de um alfinete - que podem viajar através de vasos e órgãos cheios de fluido dentro do corpo humano. Diller e sua equipe controlam o movimento desses microrrobôs sem fio usando campos magnéticos.
Cada microrrobô é construído organizando com precisão seções microscópicas de agulhas magnéticas sobre uma superfície plana, material flexível. Uma vez implantado, os pesquisadores aplicam campos magnéticos para induzir os microrrobôs a viajar com um movimento semelhante ao de um verme através de canais de fluido, ou feche suas minúsculas 'mandíbulas' mecânicas para tirar uma amostra de tecido.
"Esses robôs são muito difíceis e trabalhosos de fabricar porque o processo requer precisão, "diz o estudante de graduação, Tianqi Xu. “Também pela necessidade de montagem manual, é mais difícil tornar esses robôs menores, que é um dos principais objetivos da nossa pesquisa. "
É por isso que Xu e seus colegas de laboratório desenvolveram uma abordagem automatizada que reduz significativamente o tempo de design e desenvolvimento, e expande os tipos de microrrobôs que eles podem fabricar. Suas descobertas foram publicadas hoje em Ciência Robótica .
Microrrobôs menores e mais complexos são necessários para futuras aplicações médicas, como a entrega de drogas direcionadas, fertilização assistida, ou biópsias.
"Se estivéssemos colhendo amostras no trato urinário ou dentro de cavidades de fluido do cérebro, imaginamos que uma técnica otimizada seria fundamental para reduzir o uso de ferramentas robóticas cirúrgicas, "diz Diller.
Para demonstrar os recursos de sua nova técnica, os pesquisadores desenvolveram mais de 20 formas robóticas diferentes, que foram então programados em uma impressora 3-D. A impressora então constrói e solidifica o design, orientar as partículas magneticamente padronizadas como parte do processo.
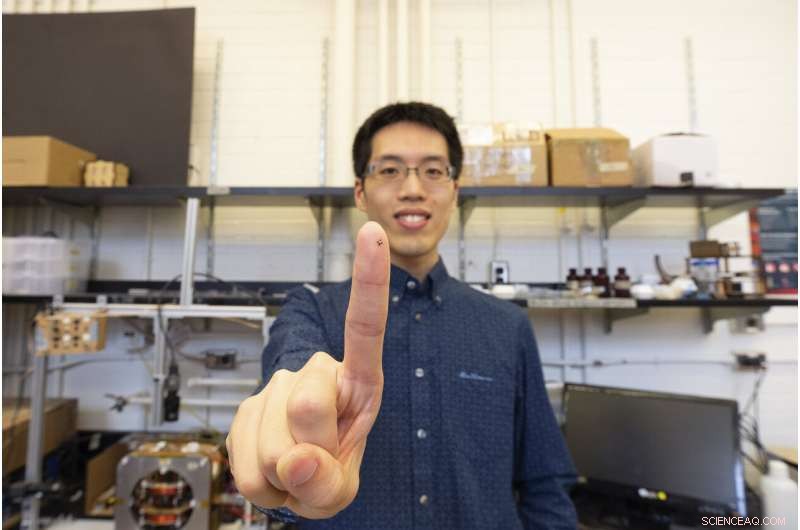
O estudante de MASc Tianqi Xu segura um microrrobô que foi fabricado usando seu sistema automatizado. Crédito:Liz Do, U of T Engineering
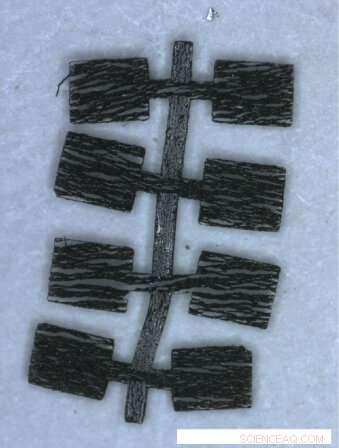
O robô magnético rastejante. Crédito:Xu et al., Sci. Robô. 4, eaav4494 (2019)
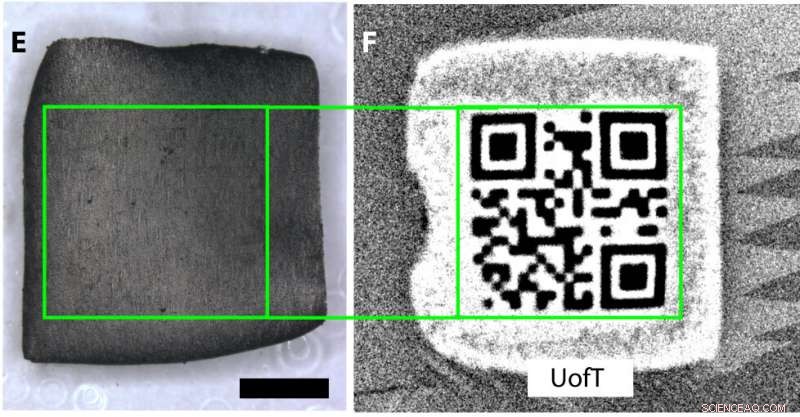
Como uma prova de conceito de que seu método pode ser usado para magnetizar polímeros macios em pequena escala, os pesquisadores codificaram magneticamente um código QR com limites claramente definidos e bordas nítidas em uma região de 5 mm x 5 mm em uma folha de polímero. Crédito:Xu et al., Sci. Robô. 4, eaav4494 (2019)
"Anteriormente, iríamos preparar uma forma e projetá-la manualmente, passar semanas planejando isso, antes que pudéssemos fabricá-lo. E essa é apenas uma forma, "diz Diller." Então, quando o construirmos, nós inevitavelmente descobriríamos peculiaridades específicas - por exemplo, podemos ter que ajustá-lo para ficar um pouco maior ou mais fino para que funcione. "
"Agora podemos programar as formas e clicar em imprimir, "acrescenta Xu." Podemos iterar, projetar e refinar facilmente. Agora temos o poder de realmente explorar novos designs. "
A abordagem otimizada dos pesquisadores abre as portas para o desenvolvimento de microrrobôs ainda menores e mais complexos do que o atual milímetro. "Achamos que é promissor podermos um dia ficar 10 vezes menores, "diz Diller.
O laboratório de Diller planeja usar o processo automatizado para explorar formas mais sofisticadas e complicadas de microrrobôs. "Como uma comunidade de pesquisa em robótica, é necessário explorar este espaço de minúsculos robôs médicos, "acrescenta Diller." Ser capaz de otimizar projetos é um aspecto realmente crítico do que o campo precisa. "