Uma abordagem para o planejamento de movimento em superfícies de asteróides com campos de gravidade irregular
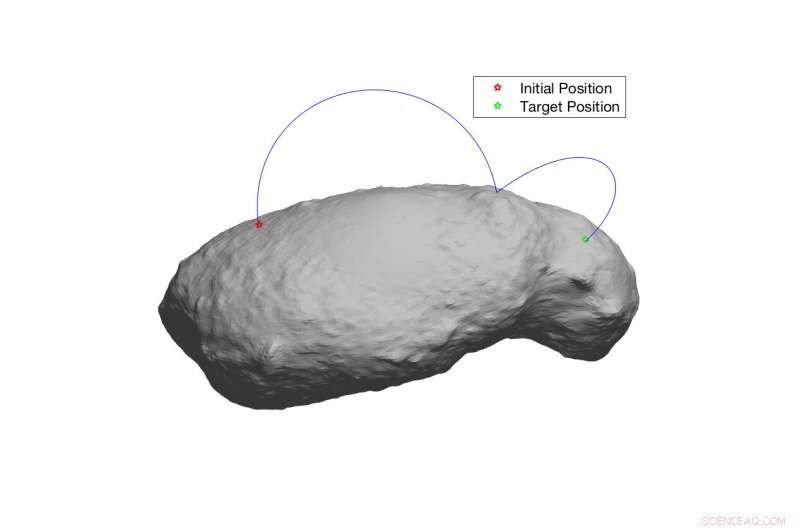
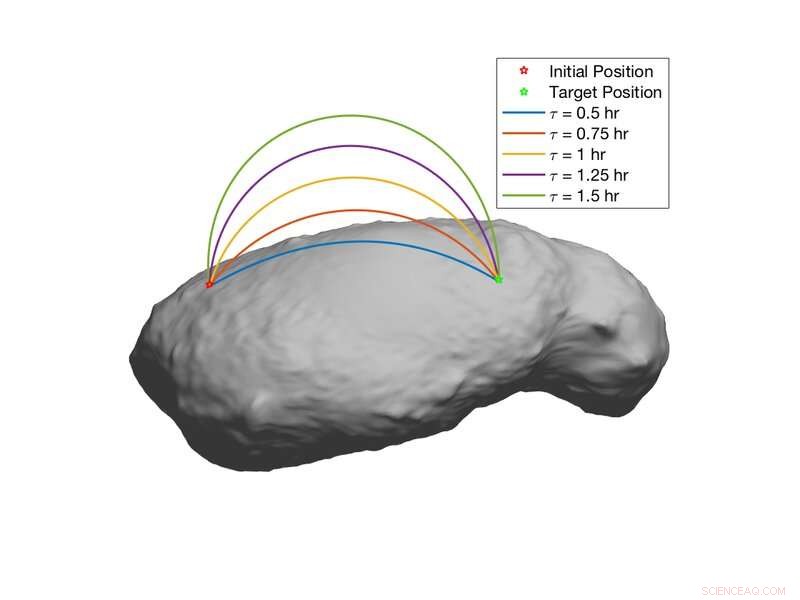 p Pular trajetórias do local inicial para um local de destino na superfície de Itokawa. Crédito:Kalita &Thangavelautham.
p Pular trajetórias do local inicial para um local de destino na superfície de Itokawa. Crédito:Kalita &Thangavelautham.
p Asteróides são pequenos, corpos rochosos orbitando o sol que são pequenos demais para serem chamados de planetas. Existem milhões de asteróides no sistema solar, variando em tamanho, forma e composição. A exploração de asteróides pode ajudar a descobrir informações fascinantes sobre a origem do sistema solar, do planeta Terra, e da própria vida. p Asteróides também podem servir como pontos estratégicos para a ciência planetária, mineração de recursos, relés de comunicação ou defesa planetária. Até aqui, Contudo, explorar as superfícies dos asteróides provou ser um grande desafio devido ao seu campo gravitacional baixo e altamente não linear.
p Missões recentes de asteróides, como Hayabusa II e OSIRIS-Rex eram meramente operações de passagem ou toque e avance. Os pesquisadores, portanto, têm tentado desenvolver tecnologia que permitiria a exploração de superfícies de asteróides, por exemplo, usando instrumentos in situ para analisar sua composição e material de subsuperfície.
p Robôs saltitantes podem ser particularmente úteis para a exploração de tais superfícies, já que a mobilidade por meio de saltos balísticos tem várias vantagens na presença de campos gravitacionais irregulares. Esses tipos de robôs podem percorrer grandes distâncias em terrenos acidentados, com gasto de energia limitado. Uma equipe de pesquisadores da Universidade do Arizona desenvolveu recentemente uma dinâmica de salto balístico e uma nova abordagem para o planejamento de movimento em superfícies de asteróides.
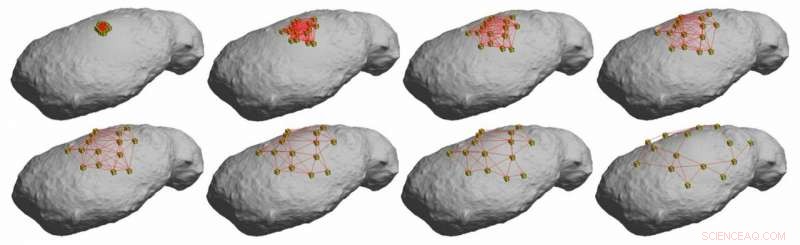
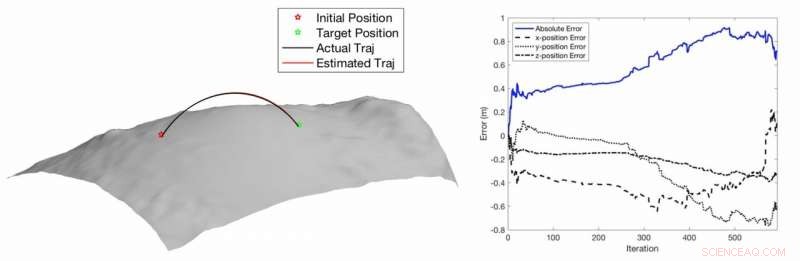 p Auto-localização usando correspondência de varredura de nuvem de pontos 3D. Crédito:Kalita &Thangavelautham.
p Auto-localização usando correspondência de varredura de nuvem de pontos 3D. Crédito:Kalita &Thangavelautham.
p "Ao contrário da Terra, a gravidade do asteróide é baixa, como tais veículos espaciais são mais adequados, já que podem percorrer grandes distâncias em terreno arbitrariamente acidentado com o gasto de pouca energia, "Himangshu Kalita, um dos pesquisadores que realizou o estudo, disse TechXplore. "Contudo, sua forma irregular resulta em um campo gravitacional altamente irregular, o que torna o salto altamente incerto. Assim, é necessária uma arquitetura sequencial para a autonomia do rover que pode planejar com antecedência antes de executar qualquer salto e, simultaneamente, localizar-se. "
p A abordagem desenvolvida por Kalita e seu colega Jekan Thanga calcula a velocidade necessária para interceptar um alvo e, em seguida, localiza o robô saltitante. Para localizar o robô, os pesquisadores empregaram métodos de estimativa de pose com base em correspondência de varredura sucessiva usando um scanner a laser 3-D.
p As informações coletadas são subsequentemente usadas para planejar o movimento do robô saltitante na superfície do asteróide alvo. O robô precisaria realizar vários saltos para chegar a um local desejado no asteróide, ao mesmo tempo, evitando obstáculos.
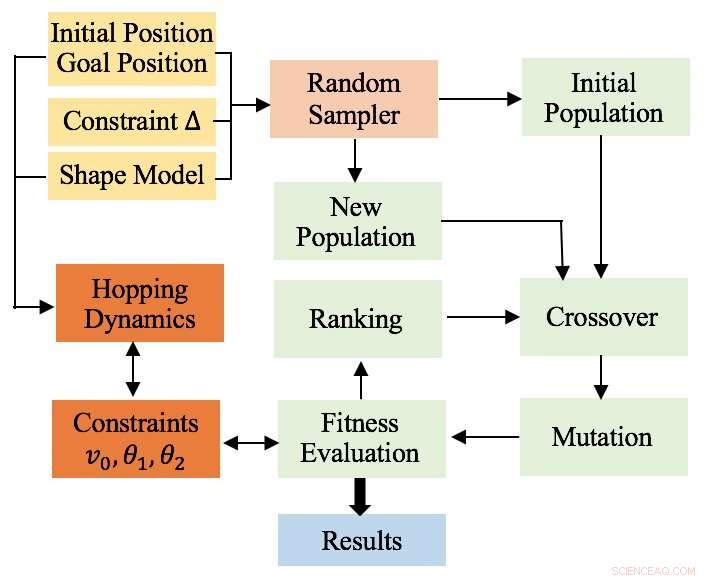 p Esquema do planejador de caminho otimizado usando Algoritmo Evolucionário. Crédito:Kalita &Thangavelautham.
p Esquema do planejador de caminho otimizado usando Algoritmo Evolucionário. Crédito:Kalita &Thangavelautham.
p "A arquitetura de planejamento de movimento discutida no artigo pode encontrar trajetórias quase ideais para um rover saltitante alcançar um local de destino a partir de sua localização inicial na superfície de um asteróide com campos gravitacionais irregulares, "Kalita explicou." Nossa abordagem usa um modelo dinâmico de alta fidelidade para realizar a avaliação de tentativa e erro na simulação de manobras candidatas para determinar sua adequação. A avaliação de tentativa e erro leva em consideração o risco, recompensas e incertezas locais. "
p Muitos asteróides são ricos em recursos como água, compostos de carbono, metais do grupo ferro e platina. Alguns asteróides também contêm restos de planetas existentes e podem, portanto, servir como "cápsulas do tempo", fornecendo registros originais da geologia e geo-história primitiva de tais planetas. Explorar esses asteróides pode oferecer uma visão valiosa sobre a origem do sistema solar e dos planetas que ele contém. No futuro, a abordagem idealizada por Thanga e Kalita pode abrir caminho para a exploração de superfícies de asteróides, levando a observações e descobertas interessantes.
-
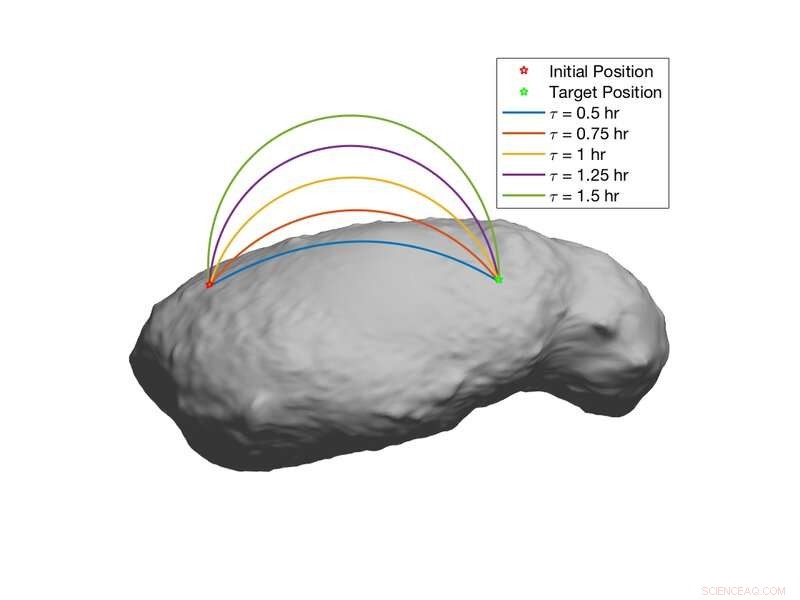
 p Trajetória ótima gerada pelo planejador de caminho para alcançar um local de destino. Crédito:Kalita &Thangavelautham.
p Trajetória ótima gerada pelo planejador de caminho para alcançar um local de destino. Crédito:Kalita &Thangavelautham.
-
 p Vários rovers explorando a superfície do asteróide Itokawa cooperativamente. Crédito:Kalita &Thangavelautham.
p Vários rovers explorando a superfície do asteróide Itokawa cooperativamente. Crédito:Kalita &Thangavelautham.
-
 p Pular trajetórias do local inicial para um local de destino na superfície de Itokawa. Crédito:Kalita &Thangavelautham.
p Pular trajetórias do local inicial para um local de destino na superfície de Itokawa. Crédito:Kalita &Thangavelautham.
p "O sobrevôo e a observação de longo alcance dos asteróides são insuficientes para determinar o que está abaixo da camada superior dos asteróides, "Thanga disse." Nossa abordagem, que envolve a realização de saltos balísticos para a exploração da superfície de asteróides, pode responder a essas perguntas. Além disso, os rovers implantados em superfícies de asteróides até agora contam com uma nave-mãe para localização, mas seu encontro é infrequente. Nossas simulações mostram que, usando um sensor de mapeamento 3-D a bordo, os rovers podem realizar a autolocalização independente da nave-mãe, que é um precursor da autonomia do rover. "
p A abordagem desenvolvida por Thanga e Kalita é projetada para planejar efetivamente o movimento de um robô saltitante em longas distâncias, em superfícies de asteróides com campos de gravidade irregulares. A mesma abordagem poderia ser aplicada a vários robôs coordenados que estão explorando simultaneamente a superfície de um determinado asteróide. Os pesquisadores também ampliaram seu método para calcular várias trajetórias ótimas, o que permitiria a um robô alcançar um objetivo desejado enquanto visitava vários pontos de passagem.
p "Estamos agora no processo de desenvolvimento de protótipos para um veículo espacial miniaturizado que usará propelentes baseados em sublimados para o salto, "Kalita disse." Com campos gravitacionais irregulares simulados, poderemos testar nossa abordagem para encontrar trajetórias de salto. " p © 2019 Science X Network