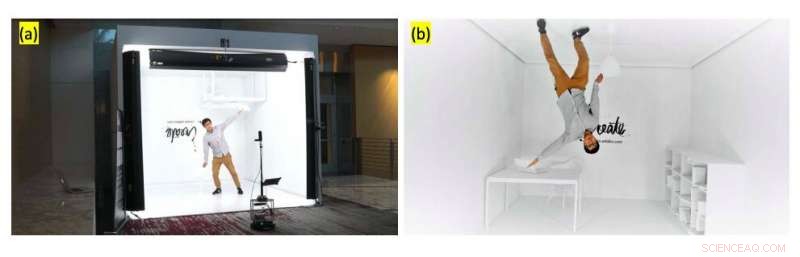
O robô movido a LeRop em ação. Crédito:Kang et al.
Tirar fotos de boa qualidade pode ser uma tarefa desafiadora, já que normalmente requer encontrar locais ideais, ângulos e condições de iluminação. Embora as fotos artísticas tenham sido tiradas principalmente por fotógrafos humanos, nos últimos anos, alguns pesquisadores começaram a investigar a possibilidade de tirar fotos automaticamente com robôs.
Para este fim, uma equipe de pesquisadores da Purdue University e da Adobe Research desenvolveu recentemente uma nova estrutura que permite que um robô capture automaticamente fotos de humanos, especificamente retratos. Esta estrutura, apresentado em um artigo pré-publicado no arXiv, faz com que os robôs sigam um usuário humano até um local ideal e, em seguida, tirem uma foto dele.
LeRop, a estrutura desenvolvida pelos pesquisadores, foi projetado especificamente para tirar retratos internos de assuntos humanos. Primeiro, a estrutura orienta um robô em direção a um local favorável ou desejado para tirar fotos e, em seguida, usa um modelo de avaliação de fotos para propor as melhores vistas, bem como o modelo de aprendizado de reforço profundo (DRL) para ajustar a posição e orientação do robô para garantir as melhores condições de iluminação.
"Quando a composição está ativada, o robô tenta ajustar sua posição para formar a visualização que melhor corresponda à imagem do modelo fornecida e, finalmente, tira uma fotografia, "os pesquisadores escreveram em seu artigo." Uma imagem de modelo pode ser prevista dinamicamente usando um modelo de avaliação de foto de prateleira pela estrutura, ou selecionado manualmente a partir de um conjunto predefinido pelo usuário. "
LeRop é uma estrutura interativa, já que os usuários podem programá-lo para seguir um alvo até o local onde deseja capturar uma fotografia. Uma vez que o usuário chega a esse ponto, o robô começa a procurar a melhor vista para capturar. O componente DRL do LeRop é o que finalmente permite ajustar seu ponto de vista com base em como ele combina imagens de modelo.
Os pesquisadores decidiram equipar o robô com uma câmera de 360 graus e uma câmera principal de alta qualidade, pois isso permite que ele tenha uma visão completa de seus arredores em todos os momentos, sem girar continuamente ou mudar para diferentes pontos de vista. Interessantemente, a estrutura tem uma estrutura modular, o que significa que todos os seus modelos podem ser substituídos ou adaptados de acordo com as necessidades do usuário.
A equipe avaliou LeRop em uma variedade de testes de teste em três cenas internas, integrando-o em um robô simples chamado Turtlebot. O robô tirou 20 fotos de um usuário humano em cada uma dessas três configurações, 10 com um modelo predefinido e 10 usando modelos gerados dinamicamente.
O número médio de ajustes feitos pelo robô foi de 11,20 para modelos predefinidos e 12,76 para os gerados dinamicamente. Além disso, usando a estrutura dos pesquisadores, o robô pode tirar fotos em um tempo médio de 22,11 segundos usando modelos predefinidos e 22,40 segundos usando modelos gerados dinamicamente.
A estrutura LeRop pode ser um primeiro passo para a criação de um sistema de fotografia de robô eficiente que pode tirar retratos de alta qualidade de forma rápida e automática. Contudo, o sistema desenvolvido pelos pesquisadores ainda apresenta uma série de limitações que podem impedir sua adoção em larga escala. Por exemplo, até aqui, tem poder de computação integrado limitado, e, portanto, só funciona em um computador remoto poderoso.
Além disso, os pesquisadores até agora só o integraram no Turtlebot, que é um robô simples com poucos graus de liberdade. Em seus próximos trabalhos, eles gostariam de testar seu sistema em um robô mais complexo com mais graus de liberdade.
"Nosso sistema atualmente suporta apenas retratos de uma pessoa, "escreveram os pesquisadores." Novas políticas precisariam ser treinadas novamente para obter melhor suporte na captura de fotos em grupo. Em trabalho futuro, também gostaríamos de testar diferentes modelos estéticos de avaliação de fotos e estender o trabalho para cenas externas. "
© 2019 Science X Network