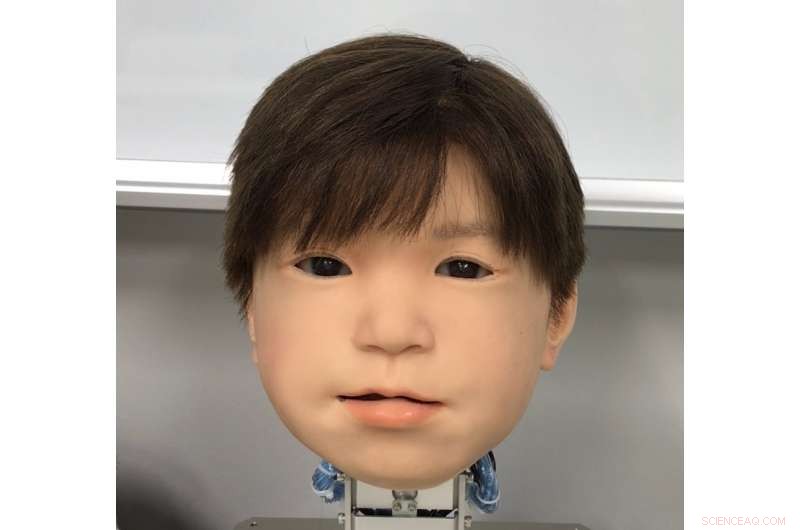
O rosto recém-desenvolvido do robô andróide infantil Affetto. O rosto de Affetto foi revelado pela primeira vez em uma pesquisa publicada em 2011. Crédito:Universidade de Osaka
A afeição do Japão por robôs não é segredo. Mas o sentimento é mútuo nos incríveis andróides do país? Os roboticistas estão agora um passo mais perto de dar aos andróides melhores expressões faciais para se comunicarem.
Apesar dos avanços, capturar expressões humanísticas em um rosto robótico continua a ser um desafio elusivo. Embora suas propriedades de sistema tenham sido geralmente abordadas, As expressões faciais dos andróides não foram examinadas em detalhes. Isso se deve a fatores como a grande variedade e assimetria dos movimentos faciais humanos naturais, as restrições de materiais usados na pele do Android, e a intrincada engenharia e matemática que conduz os movimentos dos robôs.
Um trio de pesquisadores da Universidade de Osaka descobriu agora um método para identificar e avaliar quantitativamente os movimentos faciais em sua cabeça de criança robô andróide. Chamado de Affetto, o modelo de primeira geração foi relatado em uma publicação de 2011. Os pesquisadores desenvolveram agora um sistema para tornar o Affetto de segunda geração mais expressivo. Suas descobertas oferecem um caminho para que os andróides expressem uma gama maior de emoções, e, finalmente, tem uma interação mais profunda com os humanos.
Os pesquisadores relataram suas descobertas no jornal Fronteiras em robótica e IA .
"As deformações da superfície são um problema fundamental no controle de faces de Android, "O co-autor do estudo Minoru Asada explica." Os movimentos da pele macia do rosto criam instabilidade, e este é um grande problema de hardware que enfrentamos. Procuramos uma forma melhor de medir e controlar isso. "
Os pesquisadores investigaram 116 pontos faciais diferentes em Affetto para medir seu movimento tridimensional. Os pontos faciais eram sustentados pelas chamadas unidades de deformação. Cada unidade compreende um conjunto de mecanismos que criam uma contorção facial distinta, como abaixar ou levantar parte de um lábio ou pálpebra. As medições destes foram então submetidas a um modelo matemático para quantificar seus padrões de movimento de superfície.
Enquanto os pesquisadores encontraram desafios para equilibrar a força aplicada e ajustar a pele sintética, eles foram capazes de empregar seu sistema para ajustar as unidades de deformação para o controle preciso dos movimentos da superfície facial de Affetto.
"Os rostos de robôs Android continuam sendo um problema de caixa preta:eles foram implementados, mas apenas julgados em termos vagos e gerais, "O primeiro autor do estudo, Hisashi Ishihara, diz." Nossas descobertas precisas nos permitirão controlar efetivamente os movimentos faciais do andróide para introduzir expressões mais matizadas, como sorrir e franzir a testa. "