Um famoso vídeo viral sobre o DARPA Robotics Challenge mostra todos os tipos de robôs humanóides caindo desajeitadamente. O movimento bípede é bastante instável, o que não é apenas um problema para um robô que tenta completar sua tarefa, mas também porque a queda pode danificar uma máquina muito cara.
Roboticistas em todo o mundo estão lidando com esse problema de uma infinidade de maneiras. Enquanto alguns procuram adicionar uma série de etapas corretivas depois que um robô fica desequilibrado, muito parecido com uma pessoa tropeçando depois de tropeçar, Kris Hauser deseja que os robôs sejam capazes de usar o ambiente ao seu redor.
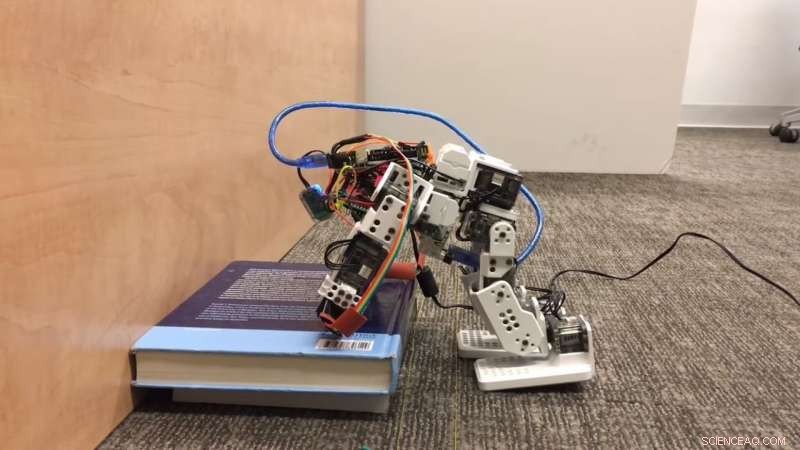
"Se uma pessoa for empurrada em direção a uma parede ou grade, eles serão capazes de usar essa superfície para se manterem de pé com as mãos. Queremos que os robôs sejam capazes de fazer a mesma coisa, "disse Kris Hauser, professor associado de engenharia elétrica e da computação e de engenharia mecânica e ciência dos materiais na Duke. "Acreditamos que somos o único grupo de pesquisa trabalhando para que um robô escolha dinamicamente onde colocar as mãos para evitar a queda."
Embora tais decisões e ações sejam uma segunda natureza para nós, programá-los nos reflexos de um robô é aparentemente difícil. Para agilizar o processo e economizar tempo de computação, Hauser programa o software para focar apenas nas articulações do quadril e ombro do robô.
Contanto que o robô não gire enquanto cai, isso cria apenas três ângulos que o algoritmo de estabilização deve levar em consideração - o pé até o quadril, o quadril no ombro, e o ombro na mão. O robô deve identificar as superfícies próximas ao alcance e então calcular rapidamente a melhor combinação de ângulos para se segurar. A solução final minimiza o impacto quando as mãos do robô fazem contato, e também minimiza a chance de suas mãos ou pés escorregarem. O algoritmo dá seu melhor palpite e, em seguida, o otimiza progressivamente usando um método chamado tiro direto.
Em seu estado atual, o robô recebe informações sobre seu ambiente e não pode navegar sozinho. Mas em um futuro próximo, Hauser planeja atualizar para um robô maior com seus próprios sensores de câmera para permitir que ele veja seus arredores.
"Esperançosamente, até o final do ano, deveremos estar fazendo experimentos com o robô realmente trabalhando em uma pista de obstáculos ao vivo, "Hauser disse." Então vamos tentar fazer com que o robô mapeie dinamicamente o que está ao seu redor e raciocine sobre como se proteger de quedas em ambientes arbitrários. "