Pesquisa sobre dinâmica e controle FNTSM de espaçonaves com sistema de bolso de captura de filme
Estrutura do sistema de bolso de captura de filme. Crédito:Espaço:Ciência e Tecnologia Nos últimos anos, com o aumento significativo das atividades de lançamento espacial, o número de naves espaciais desorbitadas aumentou acentuadamente, representando um sério impacto tanto nas naves espaciais em órbita ativa como nas atividades espaciais futuras. Os sistemas tradicionais de captura de redes de corda, servindo como uma tecnologia para desorbitar ativamente naves espaciais, possuem um vasto potencial na mitigação e remoção de detritos espaciais.
No entanto, os sistemas de corda enfrentam desafios como a dificuldade em manter a forma durante longos períodos, a suscetibilidade ao autoenredamento, as perdas de energia e a redução da área de captura efetiva. Em contraste, os filmes finos podem dobrar e desdobrar em formas regulares, oferecendo maior flexibilidade e confiabilidade em comparação com as amarras. Eles surgem como uma solução eficaz para o problema do emaranhamento e apresentam um método promissor para mitigação e remoção de detritos espaciais.
Em um artigo de revisão publicado recentemente em Space:Science &Technology , A equipe do professor Wei Cheng do Instituto de Tecnologia de Harbin, em colaboração com pesquisadores do Instituto de Engenharia de Controle de Pequim e da Universidade de Benha, projetou um sistema de bolso de captura de filme fino.
No entanto, a estrutura flexível deste sistema está sujeita a deformações e vibrações significativas durante o movimento, resultando em interferência considerável nas operações da espaçonave. Para analisar quantitativamente esses distúrbios, este estudo concentra-se na modelagem dinâmica e no controle de atitude do sistema de captura de bolsos de filme fino.
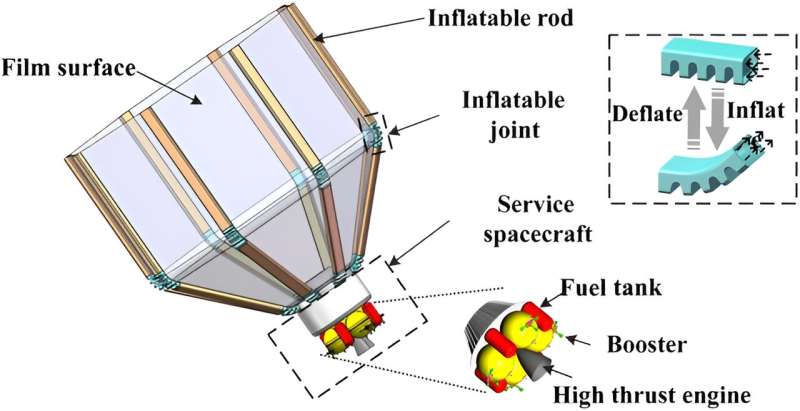
A pesquisa envolve o desenvolvimento de um controlador rápido de modo deslizante de terminal não singular (FNTSM) e um observador de dilatação de tempo fixo (FxESO) integrados a uma lei de controle de rastreamento de atitude. A eficácia do controlador é validada através do estabelecimento de um protótipo virtual. Esta pesquisa fornece suporte teórico para a futura aplicação em órbita do sistema. Processo de trabalho do sistema de bolso de captura de filme. Crédito:Espaço:Ciência e Tecnologia Primeiramente, estabeleça o modelo do sistema de bolso de captura. Utilizando uma grande estrutura de membrana flexível suportada por hastes infláveis, a parte superior forma um prisma octogonal, proporcionando um grande envelope para o mecanismo de captura, enquanto a parte inferior assume formato cilíndrico.
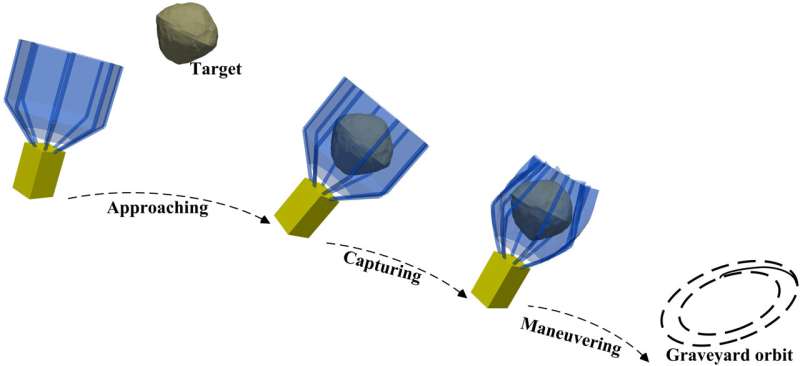
A implantação e retração do sistema são obtidas através do ajuste de inflação e deflação por meio de juntas flexíveis infláveis. O processo de trabalho do sistema ocorre principalmente em 3 etapas. Primeiro, o sistema da espaçonave é acionado pelo motor de alto empuxo para se aproximar do alvo capturado. Em seguida, juntas flexíveis infláveis são infladas para envolver o alvo. Finalmente, a espaçonave de serviço manobra ativamente para arrastar o alvo capturado para a órbita do cemitério.
Em seguida, use a Formulação de Coordenadas Nodais Absolutas (ANCF) para estabelecer o modelo dinâmico do sistema de captura de bolso de filme fino. Empregue elementos ANCF de alta ordem com 8 nós para descrever o movimento da superfície do filme, representando o vetor de posição global através de polinômios de interpolação Φi (xi , vocêeu ).
Descreva a deformação dos pontos materiais usando o tensor de deformação de Green-Lagrange e substitua-o no tensor gradiente do vetor de posição global J
eu para derivar as equações de movimento do elemento. Empregue o princípio do trabalho virtual para deduzir as equações cinemáticas do elemento. Além disso, apresente o controlador u , velocidade angular ω( ω) , e unidade quatérnio q .
Derive as derivadas dos erros de rastreamento de atitude, incluindo erro de velocidade angular ωe e matriz de rotação de atitude Aqe . Finalmente, incorporando os efeitos do momento de inércia da espaçonave JR e perturbação externa d , derivar as equações dinâmicas de atitude da espaçonave.
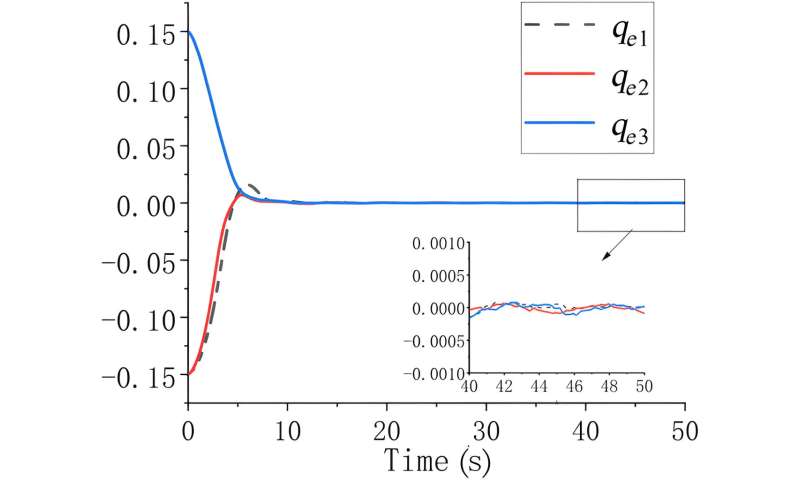
Erro de atitude qe curvas. Crédito:Espaço:Ciência e Tecnologia
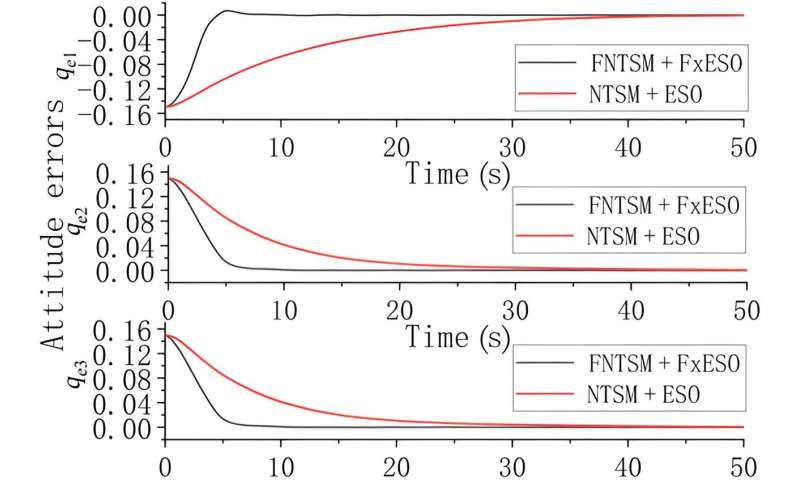
Comparação entre FNSMC + FxESO e NTSM + ESO. Crédito:Espaço:Ciência e Tecnologia
Posteriormente, o autor, com base no controle de modo deslizante não linear, desenvolveu uma superfície de modo deslizante de terminal rápido (FTSM) F . Para evitar problemas de singularidade em FTSM, uma superfície F de modo deslizante de terminal não singular rápido (FNTSM) é projetada quando |qei | <ψ .
A introdução de um Observador de Estado Estendido em Tempo Fixo (FxESO) envolve o projeto de equações dinâmicas para erros de observação, permitindo a estimativa de incertezas. Finalmente, baseado em FTNSM e FxESO, um controlador de nave espacial é projetado para alcançar convergência e estabilidade dentro de um tempo finito.
Em seguida, o autor estabeleceu um protótipo virtual e conduziu análises de simulação numérica da dinâmica relevante e das teorias de controle. O estudo revelou que, após manobras de atitude da espaçonave, o sistema se estabilizou gradativamente.
Porém, ainda existiam vibrações nas hastes flexíveis, impedindo que a membrana fosse totalmente apertada, resultando em rugas contínuas na superfície da membrana. Além disso, o controlador FNTSM + FxESO foi comparado com o controlador Nonsingular Terminal Sliding Mode (NTSM) + Expansion Observer (ESO), e os erros de atitude sob este controlador foram analisados.
Os resultados indicam que o controlador FNTSM + FxESO leva a espaçonave à atitude desejada após 10 segundos, o que é aproximadamente 25 segundos mais rápido em comparação com o controlador NTSM + ESO. Isto melhora significativamente a velocidade de convergência do erro de atitude do sistema.
Além disso, este controlador pode suprimir eficazmente vibrações de alta amplitude, mantendo o erro de atitude em estado estacionário na magnitude de 10
-4
. Isso demonstra o desempenho de alta eficiência, precisão e estabilidade do controlador proposto.
Mais informações: Zhuoran Huang et al, Dynamics and FNTSM Control of Spacecraft with a Film Capture Pocket System, Espaço:Ciência e Tecnologia (2023). DOI:10.34133/espaço.0079 Fornecido pelo Instituto de Tecnologia de Pequim Press Co., Ltd