Crédito:Julius-Maximilians-University
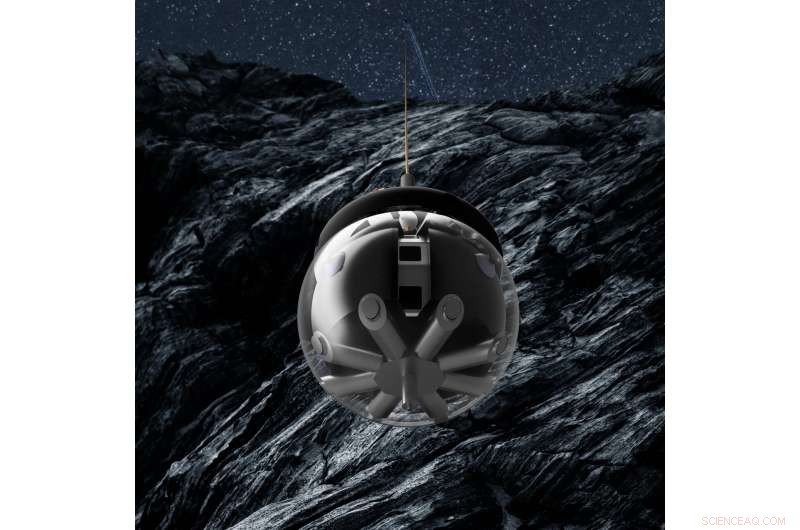
O que pode parecer uma bola de hamster pendurada é na verdade uma esfera robótica para explorar as profundezas das cavernas lunares.
Projetado por uma equipe coordenada pela Julius-Maximilians-Universität de Würzburg (JMU) da Alemanha, a Descida e Exploração em Profunda Autonomia das Estruturas Subterrâneas Lunares, DAEDALUS, o robô está sendo avaliado pelo Concurrent Design Facility da ESA, como parte de um estudo mais amplo dos conceitos de missão da caverna lunar.
Os orbitadores lunares mapearam vários poços profundos na superfície da Lua, acredita-se ser 'claraboias' em cavernas de lava. São de alto interesse científico, oferecendo acesso a material lunar imaculado - talvez até depósitos de água gelada. Essas cavernas também podem se tornar habitats para colonos lunares, oferecendo proteção natural contra radiação, micrometeoritos e temperaturas extremas de superfície.
A esfera DAEDALUS de 46 cm de diâmetro carregaria uma câmera estereoscópica imersiva, um sistema lidar de 'radar a laser' para mapeamento 3D de interiores de cavernas, sensores de temperatura e um dosímetro de radiação, bem como braços extensíveis para ajudar a eliminar obstáculos e testar as propriedades das rochas.
DAEDALUS seria primeiro abaixado na boca da caverna em uma corda longa, em seguida, desconecte-se para rolar de forma autônoma sob seu próprio poder. A corda pendurada então dobraria como um receptor Wi-Fi, permitindo que DAEDALUS retransmita suas descobertas do fosso.
"O design é impulsionado pela necessidade de observar os arredores em 360 graus completos e a necessidade de proteger o interior do severo ambiente lunar, "explica Dorit Borrmann da equipe DAEDALUS." Com as câmeras atuando como um sistema de visão estéreo e as medições de distância a laser, a esfera detecta obstáculos durante a descida e navega de forma autônoma ao chegar ao fundo do poço. "