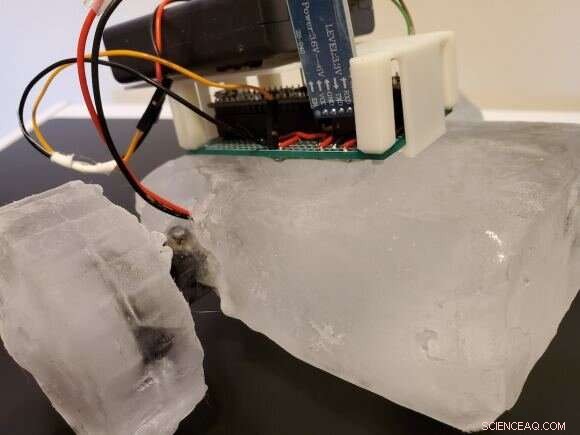
O IceBot é apenas um conceito agora, com algumas peças estruturais feitas de gelo. Crédito:GRASP Lab
Alguns dos alvos mais tentadores da exploração espacial são os mundos de gelo congelado. Pegue a lua de Júpiter, Europa, por exemplo. É quentinho, O oceano salgado abaixo da superfície está enterrado sob uma camada de gelo que cobre a extensão da lua. Qual é a melhor maneira de explorá-lo?
Talvez um robô de gelo pudesse desempenhar um papel.
Embora as agências espaciais do mundo - especialmente a NASA - estejam cada vez melhores na construção de robôs para explorar lugares como Marte, esses robôs têm limitações. Talvez a principal dessas limitações seja a possibilidade de colapso. Quando um rover em Marte - ou em algum lugar ainda mais distante - quebra, o jogo acabou. Não há maneira viável de consertar algo como o MSL Curiosity se ele quebrar durante a exploração da superfície marciana.
Mas e se o mundo que está sendo explorado fosse um mundo congelado, e o robô era feito de gelo? Será que robôs de gelo podem se auto-reparar, mesmo de forma limitada? Eles poderiam realmente ser fabricados e montados lá, mesmo parcialmente?
Um artigo recente intitulado "Robôs feitos de gelo:uma análise das técnicas de manufatura" explorou essa possibilidade. O artigo foi apresentado na Conferência Internacional de Robótica e Sistemas do IEEE (Instituto de Engenheiros Elétricos e Eletrônicos) 2020. Devin Carroll e Mark Yim escreveram. Carroll é um Ph.D. estudante de robótica na Universidade da Pensilvânia, e Yim é o Diretor do Grasp Lab e professor de engenharia mecânica na mesma instituição.
O robô inteiro não seria feito de gelo, obviamente. Mas parte da estrutura pode ser. A ideia é centrada em torno de um design modular que pode se autorreparar ou até mesmo se auto-replicar e pode ser concluído no local após a implantação, uma vez que os obstáculos do terreno e os detalhes das tarefas da missão foram melhor compreendidos.
Em seu resumo, os dois autores escrevem, "O gelo permite maior flexibilidade no design do sistema, permitindo que a estrutura robótica seja projetada e construída após a implantação, após as tarefas e os obstáculos do terreno terem sido melhor identificados e analisados. "
Obviamente, existem muitos problemas e obstáculos com essa tecnologia potencial. Mas é assim que todos eles começam.
A dupla de autores deixa claro que este é um trabalho preliminar. "Os autores exploram uma abordagem orientada à estrutura para examinar os processos de fabricação compatíveis com ênfase na conservação das energias do processo, "eles escrevem." Uma plataforma robótica móvel feita de gelo é apresentada como uma prova de conceito e primeira demonstração. "
A ideia é centrada em um rover de duas rodas chamado Icebot. O Icebot é baseado no design dos rovers da Antártica e possui elementos estruturais feitos de gelo.
Em seu trabalho, a dupla de autores realizou experimentos para explorar toda a ideia. O trabalho foi baseado em duas premissas:
O artigo também apresenta três princípios gerais de design.
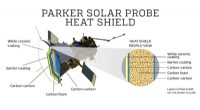
Há outra condição abrangente em tudo isso, também. Para robôs operando em outros mundos, a energia é um bem precioso. Cada missão tem um orçamento de energia que é administrado meticulosamente. Pegue a espaçonave Voyager, por exemplo. Sua impressionante longevidade se deve, pelo menos em parte, ao uso extremamente escrupuloso de energia. Portanto, a quantidade de energia que um robô de gelo usa para fabricar e construir a si mesmo é crítica.
Com essas condições em mente, os pesquisadores tiveram algumas idéias interessantes.
Em primeiro lugar, todo o cenário provavelmente envolveria não um único robô, mas um par, operando em conjunto. Uma unidade seria o veículo de exploração principal, e a outra seria como uma nave-mãe e teria capacidade de manufatura e reparo.
Em uma entrevista com o Espectro IEEE , Devin Carroll explicou como isso pode ser. "Quando penso em um robô de exploração ártico (ou planetário) que incorpora recursos de auto-modificação ou reparo, imagino um sistema com dois tipos de robôs - o primeiro explora o ambiente e coleta os materiais necessários para realizar autoaumentação ou reparo, e o segundo é algum tipo de sistema de manipulador / manufatura. Podemos imaginar a classe de exploração do robô retornando a um local centralizado com um pedido de um arado ou algum outro aumento e o sistema de manufatura será capaz de anexar o aumento diretamente ao robô. "
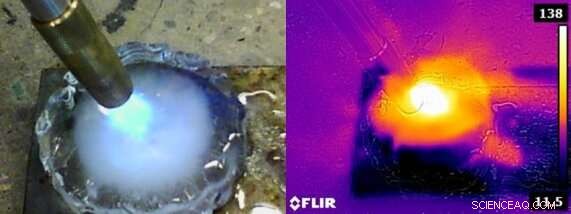
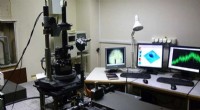
Os pesquisadores testaram uma chama aberta como um método para derreter buracos no gelo para o atuador do robô ser colocado. Esquerda:Uma tocha de butano é usada para derreter um buraco na placa de gelo. À direita:um mapa de calor (em graus C) da tocha de butano e da placa de gelo. Crédito:Carroll e Yim, 2020
A dupla de cientistas realizou alguns testes para concretizar suas idéias. Eles examinaram diferentes maneiras de manipular o gelo. Para manufatura, eles olharam para moldagem, onde o gelo seria primeiro derretido e depois derramado em um molde para ser moldado. Eles também analisaram a impressão 3D, e usinagem. Cada método tem seus prós e contras, e cada um tem diferentes necessidades de energia.
Eles também examinaram a integração do atuador. Como explicado, os próprios atuadores não podem ser feitos de gelo. Os atuadores são expostos a diferentes tensões, o gelo não aguenta. Portanto, a integração dos atuadores com componentes feitos de gelo é uma operação crítica.
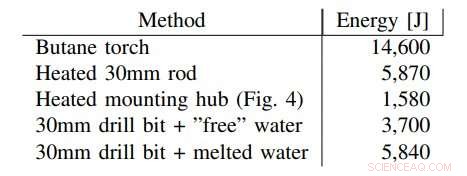
Eles experimentaram quatro maneiras diferentes de integrar atuadores:
Cada um dos métodos tem seus pontos fortes e fracos. Cada um também tem seus próprios requisitos de energia. A tabela abaixo apresenta a energia necessária para cada método para criar uma bolsa de montagem para o atuador, e congelá-lo no lugar.
Uma vez que este é um trabalho preliminar, a equipe não chegou a nenhuma conclusão permanente. Mas seus experimentos expuseram algumas armadilhas que precisarão ser superadas se a fabricação e o reparo de gelo in-situ forem implementados com eficácia.
Eles descobriram que a área de superfície do anexo é crítica para o sucesso, o que não é uma surpresa. Em poucas palavras, uma área de superfície maior na junta é melhor, e ajuda o gelo a resistir a tensões devido ao torque e outras forças. A espessura do gelo também foi um problema, o que também não é surpreendente.
Os autores resumem seu trabalho na conclusão do artigo. "Este trabalho é um passo em direção a um peso leve, sistema robótico adaptável capaz de operar em ambientes abaixo de zero. Este sistema se presta à autoconfiguração, autorreplicação e autorreparação, " eles escrevem.
"Para impulsionar o desenvolvimento de métodos automatizados para a criação e montagem deste sistema, planejamos buscar um módulo comum que possa ser facilmente integrado com blocos passivos de gelo, "eles escrevem. Isso tornaria o sistema IceBot mais simples e modular.
Eles também explicaram o que o futuro reserva para seu conceito IceBot:"Trabalhos futuros adicionais incluem:determinar uma classe geral de superfície na qual este sistema pode se mover, métodos de uso de elementos de gelo para interagir com o meio ambiente, e uma investigação mais aprofundada sobre os limites de resistência das conexões entre os atuadores e o gelo. "
No Espectro IEEE entrevista, Carroll também falou sobre o que vem por aí em seus esforços no IceBot e enfatizou a necessidade de modularidade. "Meu foco imediato é projetar uma junta modular que possamos usar para juntar facilmente e com segurança atuadores com blocos de gelo, bem como trabalhar para desenvolver um efetor final que nos permitirá manipular blocos de gelo sem deformá-los permanentemente por meio de orifícios de parafuso ou outros , métodos de conexão semelhantes. "
Há muito trabalho a ser feito antes que qualquer tecnologia de robótica de gelo possa ser implementada. Mas é um desenvolvimento tentador, e Europa e Enceladus estão esperando. Agências como a NASA estão examinando de perto os recursos in-situ para suas missões à Lua e a Marte.
O gelo é comum no sistema solar. O espaço é frio, e muitos corpos estão cobertos de gelo. Poderia ser um IceBot in-situ no futuro?