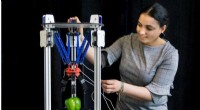
Uma equipe de pesquisadores da Escola de Engenharia USC Viterbi acredita que eles se tornaram os primeiros a criar um membro robótico controlado por IA impulsionado por tendões semelhantes a animais que podem até mesmo ser tropeçados e, em seguida, se recuperar dentro do tempo da próxima pisada, uma tarefa para a qual o robô nunca foi explicitamente programado para fazer. Crédito:Matthew Lin
Para uma girafa ou gnu recém-nascido, nascer pode ser uma introdução perigosa ao mundo - os predadores aguardam uma oportunidade de fazer uma refeição com o membro mais fraco do rebanho. É por isso que muitas espécies desenvolveram maneiras de seus juvenis encontrarem seu equilíbrio minutos após o nascimento.
É um feito evolucionário surpreendente que há muito tempo inspira biólogos e roboticistas - e agora uma equipe de pesquisadores da USC Viterbi School of Engineering acredita que eles se tornaram os primeiros a criar um membro robótico controlado por IA impulsionado por tendões semelhantes a animais que podem até mesmo ser tropeçado e, em seguida, se recuperar dentro do tempo da próxima pegada, uma tarefa para a qual o robô nunca foi explicitamente programado para fazer.
Francisco J. Valero-Cuevas, um professor de Engenharia Biomédica um professor de Biocinesiologia e Fisioterapia na USC em um projeto com o aluno de doutorado da Escola de Engenharia de Viterbi da USC Ali Marjaninejad e dois outros alunos de doutorado - Dario Urbina-Melendez e Brian Cohn, desenvolveram um algoritmo bioinspirado que pode aprender uma nova tarefa de caminhada por si só depois de apenas 5 minutos de jogo não estruturado, e depois se adaptar a outras tarefas sem qualquer programação adicional.
Seu artigo, descrito no artigo de capa de março de Nature Machine Intelligence , abre possibilidades empolgantes para a compreensão do movimento humano e da deficiência, criação de próteses responsivas, e robôs que podem interagir com ambientes complexos e mutáveis, como exploração espacial e busca e salvamento.
"Hoje em dia, leva o equivalente a meses ou anos de treinamento para um robô estar pronto para interagir com o mundo, mas queremos alcançar o aprendizado rápido e as adaptações vistas na natureza, "disse o autor sênior Valero-Cuevas, que também tem compromissos em ciência da computação, engenharia elétrica e informática, engenharia mecânica e aeroespacial e neurociência na USC.
Marjaninejad, doutorando no Departamento de Engenharia Biomédica da USC, e o autor principal do artigo, disse que esse avanço é semelhante ao aprendizado natural que acontece nos bebês. Marjaninejad explica, primeiro foi permitido ao robô compreender seu ambiente em um processo de jogo livre (ou o que é conhecido como 'balbucio motor').
"Esses movimentos aleatórios da perna permitem que o robô construa um mapa interno de seu membro e suas interações com o ambiente, "disse Marjaninejad.
Os autores do artigo dizem que, ao contrário da maioria dos trabalhos atuais, seus robôs aprendem fazendo, e sem qualquer simulação de computador anterior ou paralela para orientar o aprendizado.
Marjaninejad também acrescentou que isso é particularmente importante porque os programadores podem prever e codificar para vários cenários, mas não para todos os cenários possíveis - assim, robôs pré-programados estão inevitavelmente sujeitos a falhas.
"Contudo, se você permitir que esses [novos] robôs aprendam com experiências relevantes, então eles acabarão encontrando uma solução que, uma vez encontrado, serão colocados em uso e adaptados conforme necessário. A solução pode não ser perfeita, mas será adotado se for bom o suficiente para a situação. Nem todos nós precisamos ou queremos - ou somos capazes de despender tempo e esforço - ganhar uma medalha olímpica, "Diz Marjaninejad.
Através deste processo de descoberta de seu corpo e ambiente, os membros do robô projetados no laboratório de Valero Cuevas na USC usam sua experiência única para desenvolver o padrão de marcha que funciona bem o suficiente para eles, produzindo robôs com movimentos personalizados. "Você pode reconhecer alguém vindo pelo corredor porque essa pessoa tem uma pegada específica, certo? "Valero-Cuevas pergunta." Nosso robô usa sua experiência limitada para encontrar uma solução para um problema que então se torna seu hábito personalizado, ou 'personalidade' - temos o andarilho delicado, o caminhante preguiçoso, o campeão ... você escolhe. "
As aplicações potenciais para a tecnologia são muitas, particularmente em tecnologia assistiva, onde membros robóticos e exoesqueletos que são intuitivos e responsivos às necessidades pessoais de um usuário seriam inestimáveis para aqueles que perderam o uso de seus membros. "Exoesqueletos ou dispositivos auxiliares precisarão interpretar naturalmente seus movimentos para acomodar o que você precisa, "Valero-Cuevas disse.
"Porque nossos robôs podem aprender hábitos, eles podem aprender seus hábitos, e imitar seu estilo de movimento para as tarefas de que você precisa na vida cotidiana - mesmo quando você aprende uma nova tarefa, ou ficar mais forte ou mais fraco. "
De acordo com os autores, a pesquisa também terá fortes aplicações nas áreas de exploração espacial e missões de resgate, permitindo que robôs façam o que precisa ser feito sem serem escoltados ou supervisionados enquanto se aventuram em um novo planeta, ou terreno incerto e perigoso após desastres naturais. Esses robôs seriam capazes de se adaptar a baixa ou alta gravidade, pedras soltas um dia e lama depois de chover, por exemplo.
Os dois autores adicionais do artigo, os alunos de doutorado Brian Cohn e Dario Urbina-Melendez opinaram sobre a pesquisa:
"A capacidade de uma espécie de aprender e adaptar seus movimentos conforme seus corpos e ambientes mudam tem sido um poderoso impulsionador da evolução desde o início, "disse Cohn, doutorando em ciência da computação na Escola de Engenharia da USC Viterbi. "Nosso trabalho constitui um passo para capacitar os robôs a aprender e se adaptar a cada experiência, assim como os animais fazem. "
"Eu imagino robôs movidos a músculos, capaz de dominar o que um animal leva meses para aprender, em apenas alguns minutos, "disse Urbina-Melendez, um doutorando em engenharia biomédica que acredita na capacidade da robótica de se inspirar ousadamente na vida. “Nosso trabalho combinando engenharia, AI, anatomia e neurociência são uma forte indicação de que isso é possível. "