Pesquisadores da Universidade de Washington desenvolveram um sistema robótico que pode alimentar pessoas que precisam de alguém para ajudá-las a comer. Aqui, um voluntário demonstra como o sistema funciona. Crédito:Eric Johnson / Universidade de Washington
Cerca de 1 milhão de adultos nos Estados Unidos precisam de alguém para ajudá-los a comer, de acordo com dados do censo de 2010. É uma tarefa demorada e muitas vezes difícil, em grande parte feito por necessidade, e não por escolha.
Pesquisadores da Universidade de Washington estão trabalhando em um sistema robótico que pode ajudar a tornar isso mais fácil. Depois de identificar os diferentes alimentos em um prato, o robô pode traçar estratégias como usar um garfo para pegar e entregar a mordida desejada na boca de uma pessoa.
A equipe publicou seus resultados em uma série de artigos:Um foi publicado recentemente em IEEE Robótica e Cartas de Automação , enquanto o outro será apresentado em 13 de março na Conferência Internacional ACM / IEEE sobre Interação Humano-Robô na Coreia do Sul.
"Ser dependente de um cuidador para alimentar cada mordida todos os dias tira o senso de independência de uma pessoa, "disse o autor correspondente Siddhartha Srinivasa, Professor dotado da Boeing na Escola Paul G. Allen de Ciência da Computação e Engenharia da UW. "Nosso objetivo com este projeto é dar às pessoas um pouco mais de controle sobre suas vidas."
A ideia era desenvolver um sistema de alimentação autônomo que fosse preso às cadeiras de rodas das pessoas e alimentasse as pessoas com o que quisessem.
“Quando iniciamos o projeto, percebemos:Existem tantas maneiras pelas quais as pessoas podem comer um pedaço de comida, dependendo do seu tamanho, forma ou consistência. Como começamos? ", Disse o co-autor Tapomayukh Bhattacharjee, um associado de pesquisa de pós-doutorado na Escola Allen. "Então, montamos um experimento para ver como os humanos comem alimentos comuns como uvas e cenouras."
Os pesquisadores prepararam pratos com cerca de uma dúzia de tipos diferentes de alimentos, variando em consistência de cenouras duras a bananas macias. Os pratos também incluíam alimentos como tomates e uvas, que têm uma pele dura e interiores macios. Em seguida, a equipe deu aos voluntários um garfo e pediu-lhes que pegassem vários pedaços de comida e os dessem a um manequim. O garfo continha um sensor para medir quanta força as pessoas usavam quando pegavam os alimentos.
Os voluntários usaram várias estratégias para pegar os alimentos com diferentes consistências. Por exemplo, as pessoas espetavam itens macios como bananas em um ângulo para evitar que escorregassem do garfo. Para itens como cenouras e uvas, os voluntários tendiam a usar movimentos de balanço para aumentar a força e dar uma lança em cada mordida.
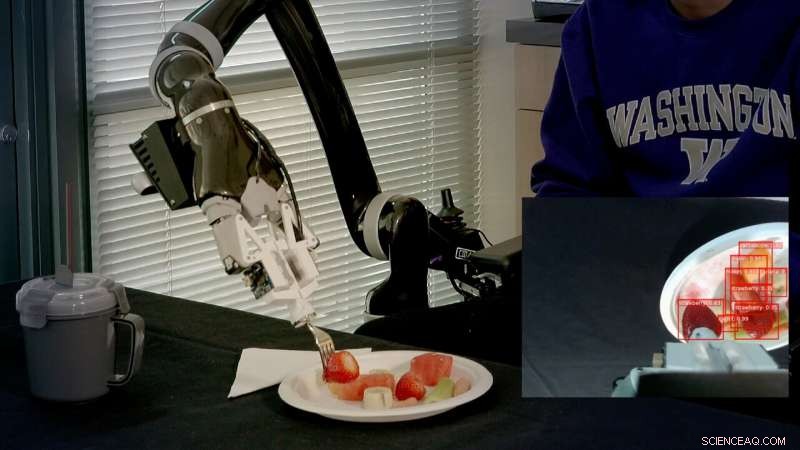
O algoritmo de detecção de objetos, chamado RetinaNet, verifica a placa, identifica os tipos de comida nele e coloca uma moldura ao redor de cada item. Crédito:Eric Johnson / Universidade de Washington
"As pessoas pareciam usar estratégias diferentes, não apenas com base no tamanho e forma do alimento, mas também em quão duro ou macio ele é. Mas será que realmente precisamos fazer isso?" Bhattacharjee disse. "Decidimos fazer um experimento com o robô onde o colocamos espetando comida até que o garfo atingisse uma certa profundidade dentro, independentemente do tipo de comida. "
O robô usou a mesma estratégia de força e espeto para tentar pegar todos os pedaços de comida, independentemente de sua consistência. Ele foi capaz de pegar alimentos duros, mas lutava com alimentos macios e aqueles com pele dura e interior macio. Então, robôs, como humanos, precisam ajustar quanta força e ângulo eles usam para pegar diferentes tipos de alimentos.
A equipe também observou que os atos de pegar um pedaço de comida e dar a alguém não são independentes uns dos outros. Os voluntários freqüentemente orientavam especificamente um pedaço de comida no garfo para que pudesse ser comido facilmente.
"Você pode pegar um palito de cenoura espetando-o no centro do palito, mas será difícil para uma pessoa comer, "Bhattacharjee disse." Por outro lado, se você pegá-lo em uma das pontas e, em seguida, inclinar a cenoura em direção à boca de alguém, é mais fácil dar uma mordida. "
Para projetar uma estratégia de espeto e alimentação que muda com base no item alimentar, os pesquisadores combinaram dois algoritmos diferentes. Primeiro, eles usaram um algoritmo de detecção de objetos chamado RetinaNet, que escaneia a placa, identifica os tipos de comida nele e coloca uma moldura ao redor de cada item.
Então eles desenvolveram o SPNet, um algoritmo que examina o tipo de comida em um quadro específico e informa ao robô a melhor maneira de pegar a comida. Por exemplo, A SPNet diz ao robô para espetar um morango ou uma fatia de banana no meio, e cenouras em uma das duas pontas.
A equipe fez com que o robô pegasse pedaços de comida e os alimentasse com voluntários usando SPNet ou uma estratégia mais uniforme:uma abordagem que espetava o centro de cada alimento independentemente do que fosse. As estratégias variáveis da SPNet superaram ou tiveram o mesmo desempenho que a abordagem uniforme para todos os alimentos.
"Muitos desafios de engenharia não são exigentes com suas soluções, mas esta pesquisa está intimamente ligada às pessoas, "Srinivasa disse." Se não levarmos em consideração como é fácil para uma pessoa dar uma mordida, então as pessoas podem não conseguir usar nosso sistema. Existe um universo de tipos de comida por aí, portanto, nosso maior desafio é desenvolver estratégias que possam lidar com todos eles. "
A equipe está atualmente trabalhando com o Taskar Center for Accessible Technology para obter feedback de cuidadores e pacientes em instalações de vida assistida sobre como melhorar o sistema para atender às necessidades das pessoas.
"Em última análise, nosso objetivo é que nosso robô ajude as pessoas a almoçar ou jantar por conta própria, "Srinivasa disse." Mas a questão não é substituir os cuidadores:queremos capacitá-los. Com um robô para ajudar, o cuidador pode configurar o prato, e depois fazer outra coisa enquanto a pessoa come. "