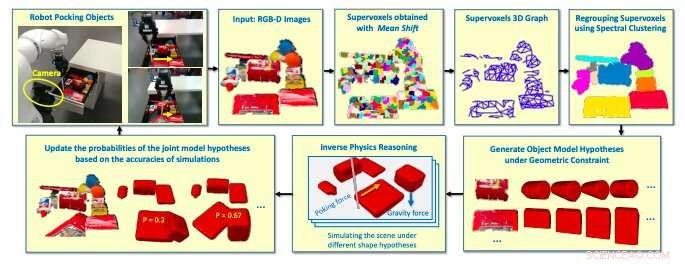
Fluxo de trabalho do sistema integrado. Crédito:Song &Boularias.
Pesquisadores da Rutgers University desenvolveram recentemente uma abordagem probabilística para a construção de modelos 3-D de objetos desconhecidos enquanto eles estão sendo manipulados por um robô. A abordagem deles, descrito em um artigo pré-publicado no arXiv, usa um mecanismo de física para verificar geometrias hipotéticas em simulações.
A maioria dos primatas aprende naturalmente a manipular uma variedade de objetos nos primeiros anos de vida. Replicando essa capacidade aparentemente trivial em robôs, Contudo, até agora provou ser muito desafiador.
Estudos anteriores tentaram conseguir isso usando uma variedade de algoritmos de manipulação, que normalmente requerem conhecimento dos modelos geométricos associados aos objetos que o robô estará manipulando. Esses modelos podem ser úteis se os objetos encontrados pelo robô forem conhecidos com antecedência, no entanto, muitas vezes falham quando esses objetos são desconhecidos.
"Consideramos especificamente as tarefas de manipulação em pilhas de entulho que contêm objetos nunca antes vistos, "os pesquisadores da Rutgers University escreveram em seu artigo." Um dos novos aspectos deste trabalho é a utilização de um motor de física para verificar geometrias hipotéticas em simulação. A evidência fornecida por simulações físicas é usada em uma estrutura probabilística que explica o fato de que as propriedades mecânicas dos objetos são incertas. "
O sistema integrado desenvolvido pelos pesquisadores possui vários componentes:um manipulador robótico, um módulo de segmentação e agrupamento, e uma unidade inversa de raciocínio físico. O manipulador robótico é projetado para empurrar ou cutucar objetos em uma pilha de desordem, enquanto o módulo de segmentação e agrupamento pode detectar objetos em imagens RGB-D.
Finalmente, a unidade de raciocínio físico inverso, que é a característica distintiva de sua abordagem, infere partes ausentes de objetos repetindo as ações do robô na simulação. Essencialmente, a unidade usa várias formas hipotéticas e atribui probabilidades mais altas àquelas que melhor correspondem às imagens RGB-D observadas.
Os pesquisadores desenvolveram um algoritmo de raciocínio de física inversa (IPR) que pode inferir partes obstruídas de objetos com base em seus movimentos observados e interações mútuas. Para treinar e avaliar seu sistema, eles usaram dois conjuntos de dados:um conjunto de dados Voxlets e um novo conjunto de dados criado usando objetos de benchmark YCB. O conjunto de dados Voxlets contém imagens estáticas de objetos de mesa, enquanto o novo banco de dados compilado por eles inclui pilhas mais densas de objetos.
A equipe avaliou a nova abordagem em uma série de experimentos usando um braço robótico Kuka montado em uma plataforma móvel Clearpath e equipado com uma mão Robotiq e uma câmera com sensor de profundidade. Nestes testes, o robô foi apresentado com objetos desconhecidos em diferentes cenários. As descobertas coletadas pelos pesquisadores foram muito promissoras, com seu algoritmo IPR inferindo formas melhores do que outras abordagens.
"Experimentos usando um robô mostram que esta abordagem é eficiente para construir modelos 3D fisicamente realistas, que pode ser útil para o planejamento de manipulação, "Os pesquisadores escreveram." Os experimentos também mostram que a abordagem proposta supera significativamente as abordagens alternativas em termos de precisão da forma. "
A nova abordagem probabilística apresentada pelos pesquisadores pode ajudar a melhorar o desempenho dos robôs em tarefas de manipulação. Em seu trabalho futuro, eles planejam desenvolver ainda mais sua abordagem, para que ele possa inferir modelos tridimensionais e mecânicos simultaneamente.
© 2019 Science X Network