 O veículo subaquático autônomo DEPTHX Foto © Stone Aerospace / PSC, Inc. p O que você precisa para explorar um oceano na Europa, uma das luas de Júpiter? Está a centenas de milhões de quilômetros de distância, e o oceano encontra-se sob uma camada de gelo de pelo menos 10 quilômetros (6 milhas) de espessura. Você provavelmente precisaria de uma nave espacial para pousar no gelo, uma maneira de perfurar o gelo, e um veículo submersível para explorar o oceano e relacionar as descobertas com a Terra.
p Este veículo submersível é um projeto que ocupa os esforços do Dr. Bill Stone, CEO da Stone Aerospace em Austin, Texas. Stone e seus colegas desenvolveram um protótipo veículo subaquático autônomo (AUV) chamado Deep Phreatic Thermal Explorer (DEPTHX) para exploração remota e atualmente estão testando em uma grande caverna subaquática. Neste artigo, vamos examinar este AUV revolucionário, sua missão e como ele se encaixa no esquema maior de exploração extraterrestre.
O veículo subaquático autônomo DEPTHX Foto © Stone Aerospace / PSC, Inc. p O que você precisa para explorar um oceano na Europa, uma das luas de Júpiter? Está a centenas de milhões de quilômetros de distância, e o oceano encontra-se sob uma camada de gelo de pelo menos 10 quilômetros (6 milhas) de espessura. Você provavelmente precisaria de uma nave espacial para pousar no gelo, uma maneira de perfurar o gelo, e um veículo submersível para explorar o oceano e relacionar as descobertas com a Terra.
p Este veículo submersível é um projeto que ocupa os esforços do Dr. Bill Stone, CEO da Stone Aerospace em Austin, Texas. Stone e seus colegas desenvolveram um protótipo veículo subaquático autônomo (AUV) chamado Deep Phreatic Thermal Explorer (DEPTHX) para exploração remota e atualmente estão testando em uma grande caverna subaquática. Neste artigo, vamos examinar este AUV revolucionário, sua missão e como ele se encaixa no esquema maior de exploração extraterrestre.
p O projeto DEPTHX faz parte de uma série financiada pela NASA para desenvolver sondas robóticas capazes de explorar Europa (discutiremos porque Europa é um alvo tão interessante mais tarde). Stone Aerospace projetado, construiu e opera DEPTHX em cooperação com seus parceiros:
 DEPTHX no convés durante um de seus testes Foto © Stone Aerospace / PSC, Inc. p O projeto DEPTHX foi desenvolvido para responder a estas perguntas:
DEPTHX no convés durante um de seus testes Foto © Stone Aerospace / PSC, Inc. p O projeto DEPTHX foi desenvolvido para responder a estas perguntas:
Cenotes (pronuncia-se "diga-NÃO-diga") são grandes sumidouros de água doce encontrados na Península de Yucután, no México. Esses cenotes se formaram quando a água subterrânea gravada no poroso calcário o leito rochoso que compõe toda a península. O cenote em Zacáton é um dos cinco cenotes conectados e é considerado o mais profundo do mundo. Zacáton também tem um nascente hidrotermal dentro dele.
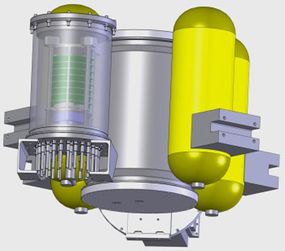
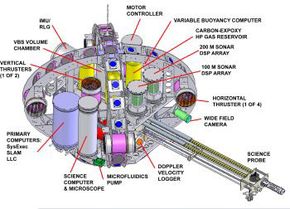 Estruturas internas DEPTHX Imagem © Stone Aerospace / PSC, Inc. p O DEPTHX AUV é em forma de ovo, com um eixo longo de 4,26 metros (13,97 pés), um eixo curto de 3,04 m (9,97 pés), e um peso de 1,3 toneladas métricas (1,43 toneladas curtas). Ele pode se mover livremente, pairar e trilha da parede em três dimensões sem quaisquer comandos externos. DEPTHX tem uma velocidade de cruzeiro mínima de 0,2 metros por segundo (0,65 pés por segundo) para mapeamento e pode ir até 1, 000 m (3, 280 pés). Para operar de forma autônoma, DEPTHX deve ser capaz de fazer o seguinte:
Estruturas internas DEPTHX Imagem © Stone Aerospace / PSC, Inc. p O DEPTHX AUV é em forma de ovo, com um eixo longo de 4,26 metros (13,97 pés), um eixo curto de 3,04 m (9,97 pés), e um peso de 1,3 toneladas métricas (1,43 toneladas curtas). Ele pode se mover livremente, pairar e trilha da parede em três dimensões sem quaisquer comandos externos. DEPTHX tem uma velocidade de cruzeiro mínima de 0,2 metros por segundo (0,65 pés por segundo) para mapeamento e pode ir até 1, 000 m (3, 280 pés). Para operar de forma autônoma, DEPTHX deve ser capaz de fazer o seguinte:
 Um close-up de um propulsor DEPTHX Imagem © Stone Aerospace / PSC, Inc. p DEPTHX tem seis propulsores (quatro horizontais e dois verticais), que permitem manobrar em três dimensões. O veículo pode ser manobrado com apenas dois dos propulsores horizontais e um dos verticais - os extras são de backup.
Um close-up de um propulsor DEPTHX Imagem © Stone Aerospace / PSC, Inc. p DEPTHX tem seis propulsores (quatro horizontais e dois verticais), que permitem manobrar em três dimensões. O veículo pode ser manobrado com apenas dois dos propulsores horizontais e um dos verticais - os extras são de backup.
p DEPTHX também pode pairar. Para manter sua posição, poderia usar os propulsores, mas isso consumiria rapidamente a valiosa energia da bateria. Em vez de, o veículo está equipado com dois motores de flutuação variável (VBE) . Um computador VBE detecta a pressão, temperatura e salinidade (teor de sal) da água circundante e calcula a flutuabilidade da embarcação. O computador então abre ou fecha válvulas que permitem que bombas ou gás pressurizado deixem a água entrar ou sair. Tal como acontece com os propulsores, há redundância embutida e o DEPTHX pode pairar usando apenas um VBE.
 Os motores de flutuação variável permitem que o DEPTHX flutue. Imagem © Stone Aerospace / PSC, Inc.
Os motores de flutuação variável permitem que o DEPTHX flutue. Imagem © Stone Aerospace / PSC, Inc. 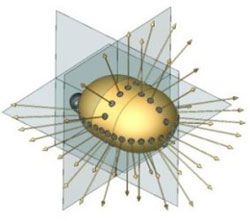 Matriz geométrica da capacidade do sensor de sonar do DEPTHX Imagem © Stone Aerospace / PSC, Inc. p O DEPTHX tem 54 sensores de sonar espaçados em torno de sua estrutura e controlados por dois matrizes de sonar . O sonar usa pulsos de ondas sonoras de alta energia e seus reflexos para localizar objetos em um raio de 250 a 300 metros do veículo. As informações que coleta são retransmitidas para computadores de bordo para controle de navegação.
p Além do sonar, DEPTHX navega usando acelerômetros, medidores de profundidade e uma unidade de orientação inercial. Um registrador de velocidade Doppler determina a velocidade com que o veículo está se movendo e alimenta essas informações para o computador principal, que ajusta a velocidade do veículo.
p Conforme o DEPTHX se move, os computadores usam as informações do sonar para construir imagens 3-D, que são sobrepostos na memória do computador para fazer um mapa geométrico progressivo. A técnica é chamada Localização e mapeamento simultâneos (SLAM) . Bill Stone e seus colegas desenvolveram um dispositivo SLAM com propulsão por mergulhador que usaram para mapear o aqüífero Wakulla Springs, na Flórida. O DEPTHX usa seu mapa internalizado para navegação, de modo que pode se mover para qualquer local específico sem o auxílio de navegação externa, como GPS.
Matriz geométrica da capacidade do sensor de sonar do DEPTHX Imagem © Stone Aerospace / PSC, Inc. p O DEPTHX tem 54 sensores de sonar espaçados em torno de sua estrutura e controlados por dois matrizes de sonar . O sonar usa pulsos de ondas sonoras de alta energia e seus reflexos para localizar objetos em um raio de 250 a 300 metros do veículo. As informações que coleta são retransmitidas para computadores de bordo para controle de navegação.
p Além do sonar, DEPTHX navega usando acelerômetros, medidores de profundidade e uma unidade de orientação inercial. Um registrador de velocidade Doppler determina a velocidade com que o veículo está se movendo e alimenta essas informações para o computador principal, que ajusta a velocidade do veículo.
p Conforme o DEPTHX se move, os computadores usam as informações do sonar para construir imagens 3-D, que são sobrepostos na memória do computador para fazer um mapa geométrico progressivo. A técnica é chamada Localização e mapeamento simultâneos (SLAM) . Bill Stone e seus colegas desenvolveram um dispositivo SLAM com propulsão por mergulhador que usaram para mapear o aqüífero Wakulla Springs, na Flórida. O DEPTHX usa seu mapa internalizado para navegação, de modo que pode se mover para qualquer local específico sem o auxílio de navegação externa, como GPS.
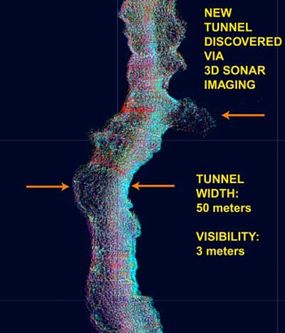 Mapa de uma porção do aquífero Wakulla Springs obtido pela Stone Aerospace Imagem © Stone Aerospace / PSC, Inc.
Mapa de uma porção do aquífero Wakulla Springs obtido pela Stone Aerospace Imagem © Stone Aerospace / PSC, Inc. 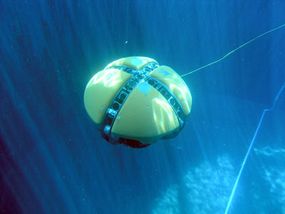 O DEPTHX AUV subaquático Imagem © Stone Aerospace / PSC, Inc. p Ele pode se comunicar por WiFi na superfície e por um único cabo de fibra óptica quando submerso. O cabo é usado para fazer upload de dados ou receber comandos de controle quando necessário.
O DEPTHX AUV subaquático Imagem © Stone Aerospace / PSC, Inc. p Ele pode se comunicar por WiFi na superfície e por um único cabo de fibra óptica quando submerso. O cabo é usado para fazer upload de dados ou receber comandos de controle quando necessário.
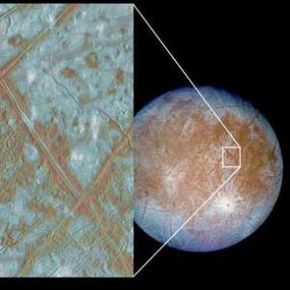 As jangadas de gelo de Europa são blocos de gelo que mostram que Europa pode ter tido um oceano subterrâneo em seu passado. Imagem cortesia do Laboratório de Propulsão a Jato da NASA p Então, porque é a Europa, uma lua interna de Júpiter, um alvo tão interessante para exploração? As sondas espaciais Voyager e Galileo mostraram que Europa estava coberta por uma camada de gelo. Porque Europa está tão perto de Júpiter, a gravidade do planeta puxa sobre ele, alongando e comprimindo alternadamente a lua em sua órbita. Essas forças gravitacionais criam calor dentro da lua. Este calor escapa por meio da atividade vulcânica e pode aquecer a parte inferior da camada de gelo, criando um oceano líquido.
p A evidência de um oceano líquido existe no padrão fraturado do manto de gelo, que tem 10 quilômetros (6,21 milhas) de espessura. Padrões semelhantes podem ser vistos no manto de gelo do Ártico visto por satélites da órbita da Terra. As medições do campo magnético indicam que o oceano em perspectiva pode ser salgado. Também, cálculos indicam que existe uma quantidade suficiente de calor gerado pelas forças das marés para formar um oceano líquido.
As jangadas de gelo de Europa são blocos de gelo que mostram que Europa pode ter tido um oceano subterrâneo em seu passado. Imagem cortesia do Laboratório de Propulsão a Jato da NASA p Então, porque é a Europa, uma lua interna de Júpiter, um alvo tão interessante para exploração? As sondas espaciais Voyager e Galileo mostraram que Europa estava coberta por uma camada de gelo. Porque Europa está tão perto de Júpiter, a gravidade do planeta puxa sobre ele, alongando e comprimindo alternadamente a lua em sua órbita. Essas forças gravitacionais criam calor dentro da lua. Este calor escapa por meio da atividade vulcânica e pode aquecer a parte inferior da camada de gelo, criando um oceano líquido.
p A evidência de um oceano líquido existe no padrão fraturado do manto de gelo, que tem 10 quilômetros (6,21 milhas) de espessura. Padrões semelhantes podem ser vistos no manto de gelo do Ártico visto por satélites da órbita da Terra. As medições do campo magnético indicam que o oceano em perspectiva pode ser salgado. Também, cálculos indicam que existe uma quantidade suficiente de calor gerado pelas forças das marés para formar um oceano líquido.
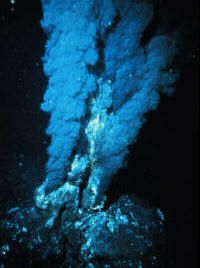 Respiradouro hidrotérmico no fundo do oceano Imagem cedida pela NOAA / Departamento de Comércio dos EUA p Se um oceano líquido existe e existe atividade vulcânica das forças das marés, então pode haver fontes hidrotermais no fundo do "oceano", como aqueles encontrados na Terra perto das dorsais meso-oceânicas.
p Na terra, sabemos que muitas formas de vida diversas sobrevivem em torno de fontes hidrotermais em comunidades baseadas em quimiossíntese , a formação de compostos orgânicos usando energia geotérmica. Bactérias quimiossintéticas formam a base da cadeia alimentar nessas comunidades. Outros organismos dentro dessas comunidades incluem vermes tubulares gigantes, amêijoas, caranguejos e peixes.
p Astrobiologistas acredito que a vida precisa de água líquida, compostos contendo carbono (orgânicos), e uma fonte de energia. Europa parece ter esses ingredientes também e, Portanto, poderia ter vida.
p Portanto, uma missão à Europa incluiria um AUV que pudesse explorar o oceano, realizar experimentos científicos e retransmitir os resultados para a Terra.
p Aeroespacial planeja construir um veículo subsequente chamado RESISTÊNCIA , o que dará um passo adiante. Será menor, mas tão capaz quanto DEPTHX. O teste do ENDURANCE será explorar um lago na Antártica que está submerso sob o manto de gelo. A NASA está atualmente desenvolvendo a tecnologia para derreter quilômetros de gelo no lago. ENDURANCE será baixado através do buraco de fusão no lago para exploração usando princípios científicos e tecnologias, desenvolvido e testado por DEPTHX.
p Para mais informações sobre DEPTHX e tópicos relacionados, confira os links na próxima página.
Respiradouro hidrotérmico no fundo do oceano Imagem cedida pela NOAA / Departamento de Comércio dos EUA p Se um oceano líquido existe e existe atividade vulcânica das forças das marés, então pode haver fontes hidrotermais no fundo do "oceano", como aqueles encontrados na Terra perto das dorsais meso-oceânicas.
p Na terra, sabemos que muitas formas de vida diversas sobrevivem em torno de fontes hidrotermais em comunidades baseadas em quimiossíntese , a formação de compostos orgânicos usando energia geotérmica. Bactérias quimiossintéticas formam a base da cadeia alimentar nessas comunidades. Outros organismos dentro dessas comunidades incluem vermes tubulares gigantes, amêijoas, caranguejos e peixes.
p Astrobiologistas acredito que a vida precisa de água líquida, compostos contendo carbono (orgânicos), e uma fonte de energia. Europa parece ter esses ingredientes também e, Portanto, poderia ter vida.
p Portanto, uma missão à Europa incluiria um AUV que pudesse explorar o oceano, realizar experimentos científicos e retransmitir os resultados para a Terra.
p Aeroespacial planeja construir um veículo subsequente chamado RESISTÊNCIA , o que dará um passo adiante. Será menor, mas tão capaz quanto DEPTHX. O teste do ENDURANCE será explorar um lago na Antártica que está submerso sob o manto de gelo. A NASA está atualmente desenvolvendo a tecnologia para derreter quilômetros de gelo no lago. ENDURANCE será baixado através do buraco de fusão no lago para exploração usando princípios científicos e tecnologias, desenvolvido e testado por DEPTHX.
p Para mais informações sobre DEPTHX e tópicos relacionados, confira os links na próxima página.














