Um robô biossincrético inspirado em arraias manta com controlabilidade estável por meio de estimulação elétrica dinâmica
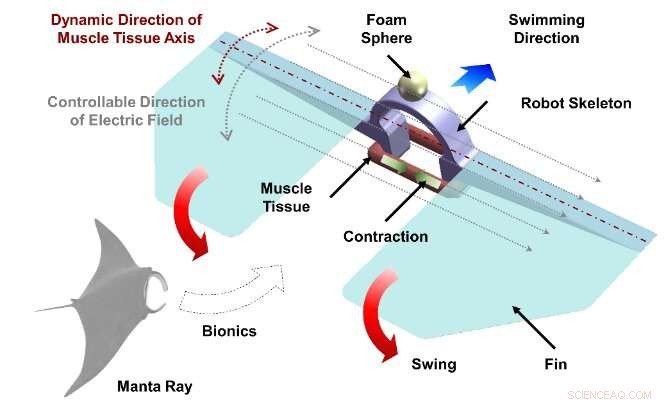
Este nadador biossincrético era composto por uma estrutura esquelética, duas barbatanas, um atuador vivo e uma microesfera de equilíbrio de espuma. Crédito:Chuang Zhang, Instituto Shenyang de Automação, Academia Chinesa de Ciências
A natureza forneceu grande apoio para o desenvolvimento de robôs. Inspirado pelas arraias manta, uma equipe do Laboratório Chave do Estado de Robótica do Instituto de Automação de Shenyang, Academia Chinesa de Ciências, desenvolveu um robô de natação biônico que é acionado por tecido muscular esquelético cultivado e controlado por múltiplos eletrodos circulares distribuídos (CDME) . O robô pode ser impulsionado de forma eficiente por apenas um tecido muscular.
A biomimética é um dos métodos de pesquisa robótica mais importantes, que pode melhorar o desempenho cinemático de robôs imitando a estrutura e o comportamento de organismos naturais. O robô biossincrético, que usa materiais biológicos naturais como elemento central, é o desenvolvimento da biônica.
Algumas células vivas têm sido usadas para realizar algumas funções de robôs, incluindo sensoriamento, controle e atuação. No entanto, métodos inovadores de propulsão e controle são necessários para desenvolver ainda mais o desempenho de movimento controlável de robôs biossincréticos. Para resolver este problema, os pesquisadores propuseram um método de controle dinâmico baseado em CDME. A pesquisa foi publicada na revista
Cyborg and Bionic Systems .
A equipe descobriu que o campo elétrico gerado pelo CDME era menos prejudicial ao meio de cultura e às células do que os eletrodos convencionais. Usando este método, a direção do campo elétrico gerado pelo eletrodo pode ser controlada dinamicamente, mantendo-o paralelo ao tecido de acionamento do robô em tempo real, garantindo assim um controle estável do robô.
Primeiro, a equipe projetou o esqueleto do robô com base na estrutura da arraia manta e usou polidimetilsiloxano (PDMS) como material principal para a estrutura. Ao mesmo tempo, para facilitar a montagem do tecido de acionamento e da estrutura do robô, os pesquisadores escolheram o tecido em forma de anel feito pelos mioblastos como unidade de acionamento do robô.
Além disso, para obter tecidos musculares circulares com contratilidade efetiva, uma estimulação elétrica rotacional do CDME foi usada para realizar a indução uniforme dos mioblastos para se diferenciarem em miotubos. Para permitir que o robô nadasse na velocidade desejada, a contratilidade do tecido muscular foi medida antes da montagem com a estrutura do nadador. A equipe de pesquisa também usou métodos de simulação para analisar a relação entre o desempenho do movimento do robô e a força de contração do tecido motor.
Finalmente, para demonstrar o movimento estável e controlável do robô biossincrético proposto, os pesquisadores realizaram a natação controlável do robô em diferentes velocidades usando o método de estimulação elétrica dinâmica proposto. No experimento, o robô demonstrou natação eficaz e controlabilidade estável, o que verificou a eficácia do projeto biomimético e do método de controle baseado em CDME proposto pela equipe de pesquisa.
O projeto biomimético e o método de controle de atuação proposto neste estudo não apenas promovem o desenvolvimento de robôs biossincréticos, mas também têm um significado orientador para o projeto biomimético de robôs macios, engenharia de tecidos musculares e outros campos relacionados.
No entanto, embora os atuais robôs biossincréticos tenham alcançado um movimento controlado eficaz, ainda existem muitos gargalos importantes que precisam ser superados. Por exemplo, a maioria dos robôs tem centímetros de tamanho, o que é difícil para aplicações como entrega de drogas in vivo.
Tecnologias como impressão 3D e manipulação flexível orientada para micro-nano estruturas biológicas são fundamentais para o desenvolvimento de micro-robôs biossincréticos para aplicações clínicas e outros ambientes especiais. Além disso, a maioria dos robôs biossincréticos existentes dependem de estímulos artificiais externos para obter movimentos controlados, que podem não ter autonomia. Portanto, o método de detecção e controle baseado em células vivas pode ser aplicado à pesquisa de robôs biossincréticos para realizar movimentos autônomos de robôs com base em informações ambientais.
+ Explorar mais Um método inspirado em castores para guiar os movimentos de um robô nadador de uma perna