Crédito:MIT Computer Science &Artificial Intelligence Lab
O uso de ferramentas tem sido uma marca registrada da inteligência humana, bem como um problema prático a ser resolvido para uma vasta gama de aplicações robóticas. Mas as máquinas ainda são instáveis em exercer a quantidade certa de força para controlar ferramentas que não estão rigidamente presas às mãos.
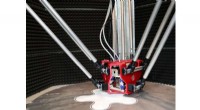
Para manipular essas ferramentas de forma mais robusta, pesquisadores do Laboratório de Ciência da Computação e Inteligência Artificial do MIT (CSAIL), em colaboração com o Toyota Research Institute (TRI), projetaram um sistema que pode agarrar ferramentas e aplicar a quantidade adequada de força para uma determinada tarefa , como espremer um líquido ou escrever uma palavra com uma caneta.
O sistema, apelidado de Series Elastic End Effectors, ou SEED, usa garras de bolha macias e câmeras embutidas para mapear como as garras se deformam em um espaço de seis dimensões (pense em um airbag inflando e desinflando) e aplicando força a uma ferramenta. Usando seis graus de liberdade, o objeto pode ser movido para a esquerda e para a direita, para cima ou para baixo, para frente e para trás, rolar, inclinar e guinar. O controlador de malha fechada - um sistema autorregulado que mantém um estado desejado sem interação humana - usa SEED e feedback visuotátil para ajustar a posição do braço do robô para aplicar a força desejada.
Isso pode ser útil, por exemplo, para quem usa ferramentas quando há incerteza na altura de uma mesa, pois uma trajetória pré-programada pode perder completamente a mesa. "Temos confiado fortemente no trabalho de Mason, Raibert e Craig no que chamamos de controlador de posição de força híbrida", diz Hyung Ju Suh, Ph.D. estudante de engenharia elétrica e ciência da computação no MIT, afiliada do CSAIL e autor principal de um novo artigo sobre o SEED. "Essa é a ideia, que se você realmente tivesse três dimensões para se mover quando estiver escrevendo em um quadro-negro, você quer ser capaz de controlar a posição em alguns dos eixos, enquanto controla a força no outro eixo."
Crédito:MIT Computer Science &Artificial Intelligence Lab Robôs de corpo rígido e suas contrapartes só podem nos levar até certo ponto; a suavidade e a complacência proporcionam o luxo e a capacidade de deformar, de sentir a interação entre a ferramenta e a mão.
Com o SEED, cada execução que o robô detecta é uma imagem 3D recente das garras, rastreando assim em tempo real como as garras estão mudando de forma ao redor de um objeto. Essas imagens são usadas para reconstruir a posição da ferramenta e o robô usa um modelo aprendido para mapear a posição da ferramenta para a força medida. O modelo aprendido é obtido usando a experiência anterior do robô, onde ele perturba um sensor de torque de força para descobrir o quão rígidas são as garras de bolha. Agora, uma vez que o robô tenha sentido a força, ele irá compará-la com a força que o usuário comanda, e talvez dizer a si mesmo:"Acontece que a força que estou sentindo agora não está lá. Preciso pressionar mais difícil." Ele então se moveria na direção para aumentar a força, tudo feito no espaço 6D.
Durante a "tarefa do rodo", o SEED recebeu a quantidade certa de força para limpar um pouco de líquido em um avião, onde os métodos básicos lutavam para obter a varredura certa. Quando solicitado a colocar papel na caneta, o bot efetivamente escreveu "MIT" e também foi capaz de aplicar a quantidade certa de força para apertar um parafuso.
Embora o SEED estivesse ciente do fato de que ele precisa comandar a força ou o torque para uma determinada tarefa, se agarrado com muita força, o item inevitavelmente escorregaria, então há um limite superior para essa dureza exercida. Além disso, se você for um robô rígido, poderá simular sistemas mais macios do que sua rigidez mecânica natural, mas não o contrário.
Atualmente, o sistema assume uma geometria muito específica para as ferramentas:tem que ser cilíndrica, e ainda há muitas limitações de como pode generalizar quando encontra novos tipos de formas. O próximo trabalho pode envolver a generalização da estrutura para diferentes formas para que ela possa lidar com ferramentas arbitrárias na natureza.
"Ninguém ficará surpreso que a conformidade possa ajudar com ferramentas, ou que o sensor de força seja uma boa ideia; a questão aqui é onde no robô a conformidade deve ir e quão suave deve ser", diz o coautor do artigo Russ Tedrake, o Toyota Professor de Engenharia Elétrica e Ciência da Computação, Aeronáutica e Astronáutica e Engenharia Mecânica no MIT e pesquisador principal do CSAIL. "Aqui exploramos a regulação de uma rigidez bastante suave de seis graus de liberdade diretamente na interface mão/ferramenta e mostramos que há algumas vantagens interessantes em fazer isso."
+ Explorar mais Ajudando robôs macios a se tornarem rígidos sob demanda