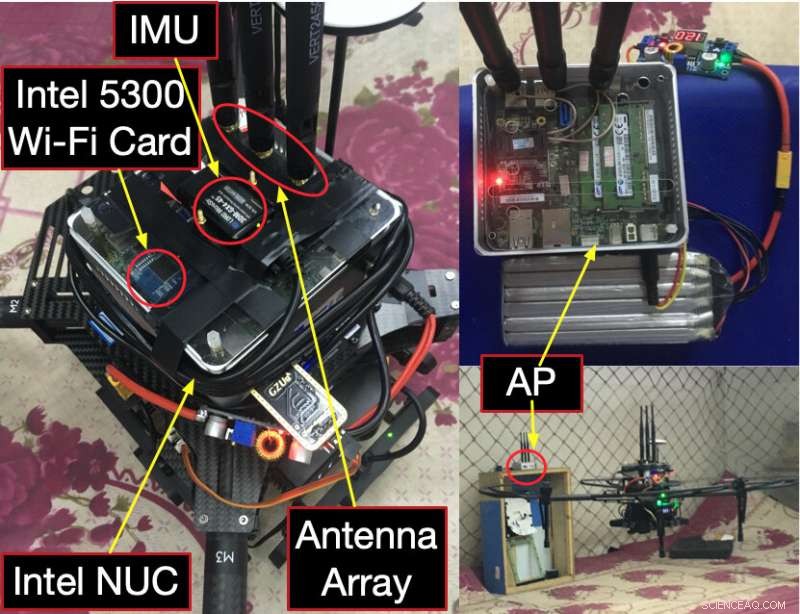
Crédito:Zhang, Wang e Jiang.
Micro veículos aéreos (MAVs) podem ter inúmeras aplicações úteis, por exemplo, auxiliando humanos na conclusão de inventários de depósitos ou missões de busca e resgate. Embora muitas empresas em todo o mundo já tenham começado a produzir e usar MAVs, alguns desses robôs voadores ainda têm limitações consideráveis.
Para trabalhar de forma mais eficaz, Os MAVs devem ser apoiados por um sistema eficiente de estimativa de pose. Este é um sistema ou método que pode calcular a posição e atitude de um drone, que pode então ser usado para controlar seu vôo, ajustar sua velocidade e auxiliar sua navegação enquanto está operando de forma autônoma e quando controlado remotamente.
Pesquisadores da Universidade Huazhong de Ciência e Tecnologia na China desenvolveram recentemente um novo sistema para a estimativa de pose de MAVs em ambientes internos. Sua nova abordagem, descrito em um artigo pré-publicado em arXIv e definido para ser publicado em Transações IEEE em Eletrônica Industrial , aproveita a infraestrutura WiFi existente para permitir uma navegação mais eficaz em drones pequenos e ágeis.
"Em nosso trabalho anterior, provamos a viabilidade de usar a localizabilidade do WiFi para corrigir o desvio do sensor inercial onboard (IMU), "Shengkai Zhang, um dos pesquisadores que realizou o estudo, disse TechXplore. "Contudo, a técnica que desenvolvemos, apelidado de CWISE, só funciona em espaços abertos e sem esmaecimento de multipath. Em nosso estudo atual, forçamos esse método ainda mais para abordar o problema de caminhos múltiplos em ambientes internos e tornar nosso sistema proposto mais prático. "
O principal objetivo do novo estudo realizado por Zhang e seus colegas era usar a infraestrutura WiFi prontamente disponível para estimar as poses de 6-DoF dos MAVs. Em contraste com as técnicas de estimativa de pose existentes com base em visão computacional, o sistema que desenvolveram está livre de limitações visuais, o que significa que funciona bem sob diferentes condições de iluminação e ambientais.
Em vez de analisar estímulos visuais coletados por sensores, o sistema aproveita as muitas subportadoras de sinais de multiplexação por divisão de frequência ortogonal (OFDM) WiFi. Mais especificamente, ele usa esses sinais para encontrar o ângulo de chegada (AoA) do caminho direto entre um MAV e um ponto de acesso WiFi entre as muitas reflexões do sinal em ambientes internos.
O sistema criado por Zhang e seus colegas tem dois componentes principais:um algoritmo de estimativa AoA e um modelo de fusão de sensor WiFi-inercial. O algoritmo de estimativa AoA é um método computacional que estima as atitudes do MAV e separa o AoA para posicionamento. O modelo de fusão de sensor inercial WiFi, por outro lado, combina o AoA estimado e os dados coletados usando sensores inerciais para otimizar as poses de um drone.
"É bem sabido que os ângulos podem ser usados para localizar um alvo por meio de triangulação, Contudo, sem uma escala métrica, "Zhang disse." Por outro lado, a IMU de um VAM fornece poses métricas, mas sofre de deriva temporal. Nós fundimos AoAs WiFi e medições inerciais e obtemos o melhor dos dois mundos. "
O sistema desenvolvido por Zhang e seus colegas tem inúmeras vantagens sobre as técnicas de estimativa de pose mais convencionais. Primeiro, é leve e imediatamente implantável em qualquer ambiente interno coberto por uma rede sem fio. Além disso, ele tem um bom desempenho em áreas de trabalho com diferentes condições de iluminação e textura.
O estudo destaca o potencial do uso de conexões WiFi para melhorar as estratégias de detecção e navegação em robôs. Quando testado em uma série de experimentos em ambientes internos, o novo sistema de estimativa de pose alcançou resultados notáveis, apresentando um erro médio de posição de 61,7cm e um erro de atitude de 0,92 graus. No futuro, pode ser usado para melhorar a navegação MAV em armazéns, escritórios ou outros ambientes internos.
"Atualmente, a precisão do nosso estimador de pose inercial WiFi está no nível de decímetro, "Zhang disse." Gostaríamos de melhorar isso. Enquanto isso, O próprio WiFi tem algumas limitações, por exemplo., bloqueio de estrutura, interferência, e assim por diante. Acreditamos que o acoplamento adequado do sensor visual e do sensor sem fio proporcionaria uma estimativa de pose mais robusta e precisa, o que resulta em robôs autônomos mais práticos. "
© 2020 Science X Network