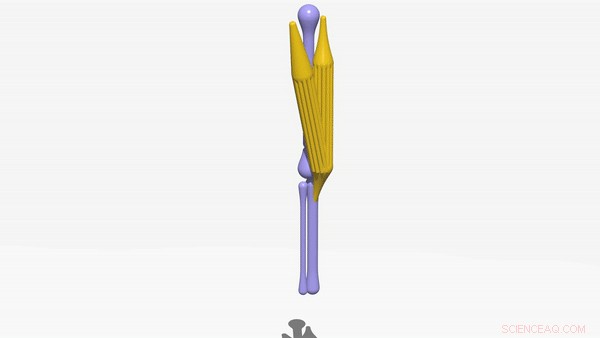
Resultado da simulação de uma articulação do cotovelo realizando flexão da articulação isocinética. Úmero, ulna e rádio são modelados com filamentos rígidos em roxo. Os tendões são modelados com filamentos afilados em amarelo. Duas cabeças de bíceps consistindo de 36 filamentos estão realizando a contração voluntária máxima. As condições de limite são aplicadas para garantir uma velocidade angular constante. Crédito:Nature Communications, doi:10.1038 / s41467-019-12759-5
Cientistas da vida e bioengenheiros estudam sistemas naturais e organismos para entender seus mecanismos biofísicos, a fim de conduzir aplicações de engenharia biomimética no laboratório. Em um relatório recente sobre Nature Communications , Xiaotian Zhang e colegas dos Departamentos de Engenharia Mecânica e Aplicações de Supercomputação dos EUA apresentaram uma abordagem numérica para simular arquiteturas musculoesqueléticas. O método baseou-se na montagem de hastes de Cosserat ativas e passivas heterogêneas (uma curva baseada em haste direcionada deformável) em estruturas dinâmicas para modelar ossos, tendões, ligamentos, fibras e conectividade muscular. Eles demonstraram as aplicações da técnica, resolvendo uma série de problemas em cenários biológicos e robóticos leves em muitos ambientes e escalas. A equipe projetou robôs bio-híbridos em escala milimétrica e reconstruiu sistemas musculoesqueléticos complexos. O método é versátil e oferece uma estrutura para auxiliar os projetos de bioengenharia direta e reversa para descobertas fundamentais sobre as funções dos organismos vivos.
Os sistemas musculoesqueléticos contêm ossos, músculos, tendões e ligamentos para funcionar juntos em sistemas biológicos nativos. Curiosamente, tais arquiteturas contêm um nexo inseparável entre atuação e controle, topologia e mecânica devido a constituintes não lineares. Em total contraste com os robôs de corpo rígido, criaturas biológicas suaves podem implementar deformações e instabilidades estruturais para funcionar dentro do complexo, ambientes não estruturados e dinâmicos. As arquiteturas musculoesqueléticas biológicas possuem uma distribuição intrínseca, suavidade e conformidade para terceirizar tarefas de controle para uma variedade de compartimentos. Essa propriedade fornece a base para um paradigma emergente na robótica de inspiração biológica, conhecido como computação morfológica ou inteligência mecânica. As considerações levaram a uma variedade de avanços experimentais em robótica leve com materiais compatíveis artificiais para formar robôs bio-híbridos flexíveis. Apesar dos avanços experimentais no campo, esforços para modelar e simular arquiteturas musculoesqueléticas dinâmicas em estruturas biológicas e sintéticas ainda precisam ser realizados.
Simulando a articulação do cotovelo humano
Zhang et al. primeiro demonstrou um método para incluir a dinâmica completa de deformação, como curvatura, torção, cisalhamento e estiramento envolvidos com arquiteturas biológicas. Por esta, eles se basearam em trabalhos anteriores em hastes de cosserato para estabelecer uma abordagem de modelagem musculoesquelética para simular de forma realista layouts biológicos heterogêneos em uma abordagem gradual para sintetizar e replicar arquiteturas vivas com camadas biológicas de complexidade para aplicações biomiméticas avançadas. O trabalho permitiu que eles reproduzissem sistemas biológicos imitando a biomecânica subjacente e forneceu acesso para estudar e compreender as funções biofísicas de organismos biológicos no silício. O estudo demonstrou que as aplicações dos modelos de haste desempenham um papel valioso na modelagem de sistemas ativos complexos para arquiteturas biomiméticas.
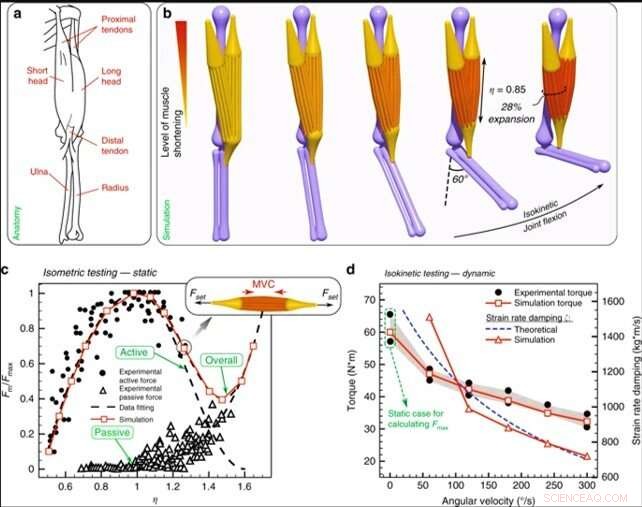
Atuação de cotovelo humano. (a) Anatomia do cotovelo. (b) Simulação de um cotovelo composto por três ossos (úmero, ulna e rádio) e duas cabeças do bíceps (cabeça curta e longa) realizando uma flexão completa. (c) Dados experimentais e simulações para força ativa e passiva normalizadas com força de pico (Fm / Fmax) durante o exercício isométrico (Fset imita a resistência encontrada pelo músculo e resulta em seu comprimento de equilíbrio η). (d) Medições experimentais e de simulação de torque da articulação do cotovelo (angulada em 60 °) realizando flexões concêntricas isocinéticas máximas em diferentes velocidades angulares junto com o amortecimento da taxa de tensão muscular total correspondente ζ. Os ζ determinados numericamente são então comparados com estimativas teóricas baseadas no modelo de Hill. Crédito:Nature Communications, doi:10.1038 / s41467-019-12759-5
Durante a primeira simulação biomimética, Zhang et al. usou uma articulação do cotovelo humano com músculos, tendões e ossos para ilustrar conjuntos de hastes mapeados para a fisiologia, dinâmica e morfologia. Por exemplo, a articulação do cotovelo mostrou características macias e rígidas, dinâmica simplificada e espaço de configuração reduzido. A análise permitiu que eles verificassem e calibrassem o modelo com base em dados anatômicos e biomecânicos prontamente disponíveis para relacionar ao modelo de Hill. O nível de detalhe da representação permitiu que atendessem às necessidades cinesiológicas específicas do paciente humano e reconstruíssem virtualmente uma réplica 3-D de uma articulação do cotovelo humano usando testes isométricos e isocinéticos aplicáveis à engenharia de tecido ósseo. Os cientistas poderiam modelar, calibrar e validar a atuação de uma unidade muscular individual, onde o resultado reproduziu a dinâmica e morfologia de um sistema biológico. A abordagem de modelagem atual apresentou características-chave que a diferenciam do modelo Hill, incluir (a) hastes individuais para recrutamento seletivo para simular uma lesão, e (b) músculos flexíveis que podem dobrar, torça e cisalhe realisticamente para forças dinâmicas em toda a estrutura ou dentro do ambiente.
Robôs bio-híbridos de engenharia
No próximo experimento, a equipe projetou robôs bio-híbridos usando seu solucionador computacional para orientar o projeto e a fabricação de robôs bio-híbridos nadadores e ambulantes em escala milimétrica. Para investigar o comportamento de natação dos robôs, eles primeiro resolveram problemas usando modelagem numérica e simulações de um flagelo bio-híbrido previamente estabelecido. Por esta, eles criaram uma réplica exata do nadador original e modelaram o substrato de polidimetilsiloxano (PDMS) para imitar a geometria experimental e as propriedades do material com células vivas agrupadas modeladas como um pequeno, filamento macio e contrátil conectado ao substrato. As observações qualitativas e quantitativas do movimento de natação entre a simulação e o experimento combinaram bem.
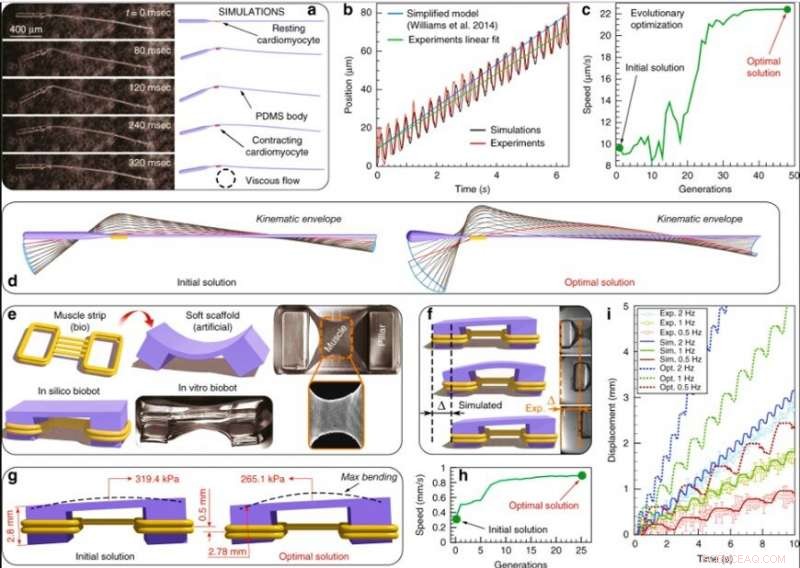
Projeto robótico bio-híbrido. (a) Comparação um a um do robô com fotografias experimentais em diferentes estágios de um ciclo de natação. (b) Posição axial do centro do robô monitorado ao longo de mais de 20 ciclos em comparação com os dados experimentais. (c) Curso de otimização:a convergência para a solução ótima é observada após 48 gerações. A otimização foi restringida com o comprimento da cabeça dentro de [0, 1,927] mm, raio da cabeça dentro de [4, 40] μm, raio da cauda dentro de [4, 6,5] μm e localização da célula em qualquer ponto ao longo da cauda. A dimensão longitudinal do bot é fixada em L =1,927 mm, de modo que o comprimento da cauda pode ser inferido a partir do comprimento da cabeça. Os intervalos de parâmetros são determinados para levar em conta a capacidade de fabricação real. (d) Visualização dos designs original e ideal, mostrando configurações em repouso e envelopes cinemáticos da linha média ao longo de um período. Detalhes originais do nadador:o substrato é modelado com cabeça de 424 μm de comprimento e cauda de 1503 μm de comprimento com raios de 20 μm e 7 μm, respectivamente. Densidade ρ =0,965gcm − 3, Módulo de Young E =3,86 MPa, rigidez de flexão EI =2,427 × 10−9Nmm2, massa m =7,364 × 10−7g são definidos. A célula contrátil é modelada com raio de 10μm e comprimento de 100μm. A célula é configurada para produzir uma força de contração F =σmA =12μN com frequência de batimento f =3,6 Hz23. O fluido tem viscosidade dinâmica μ =1,2 × 10−3Pa⋅s. Detalhes otimizados do nadador:o substrato tem comprimento e raio de 190μm e 32,3μm, respectivamente. A célula contrátil está fixada a 190μm da cabeça e a cauda tem 4,3μm de espessura. (e) Desenho geral do andador com elementos amarelos representando anéis de músculos e elementos roxos representando o esqueleto. Imagens experimentais adaptadas de estudos anteriores. (f) Simulações versus experimentos:deslocamento do bot em 2 segundos para a frequência de atuação 1 Hz. (g) Visualização do desenho inicial e otimizado do andador. (h) O curso de otimização converge após 25 gerações. A otimização foi restringida com o módulo de Young do esqueleto [250-350] kPa, comprimento do pilar mais curto [2,4-3,4] mm e localização da faixa muscular [0,5-3] mm (distância do solo), todos os quais são escolhidos de acordo com as restrições de fabricação. (i) Comportamento dinâmico de andador simulado (linhas sólidas) e experimental (marcadores com barras de erro) com contração muscular em diferentes frequências, e comparação do desempenho de caminhada entre o design inicial (linhas sólidas) e o design otimizado (linhas tracejadas). Crédito:Nature Communications, doi:10.1038 / s41467-019-12759-5
Depois de modelar e otimizar o nadador bio-híbrido, eles tentaram projetar computacionalmente um andador bio-híbrido conforme desenvolvido anteriormente para formar a máquina biológica móvel mais rápida até o momento por Pagan-Diaz et al., baseado em um robô bio-híbrido anterior. Estruturalmente, o modelo Pagan-Diaz continha um arcabouço de hidrogel assimétrico e tecidos musculares esqueléticos para se assemelhar às relações músculo-tendão-osso in vivo e operado em um banho de solução no laboratório. Experimentalmente, eles suspenderam os músculos e os chocaram eletricamente para induzir a contração para o movimento por meio de assimetria e fricção.
Zhang et al. simulei esta arquitetura no presente trabalho, para projetar um novo andaime e arranjos musculares topológicos do bot. A nova topologia de tecido muscular continha uma seção de tira fina conectando dois anéis enrolados nas pernas do esqueleto para transferir as forças de contração muscular, que eles testaram usando estudos de benchmark. Zhang et al. demonstrou experimentalmente o projeto de computação com o modelo Pagan-Diaz para construir um novo bio-bot com o dobro da velocidade do robô bio-híbrido original; com boa concordância observada na simulação. A equipe de pesquisa mostrou o potencial da abordagem computacional para encapsular a física de sistemas robóticos macios movidos a células e músculos para as aplicações desejadas para projetar protótipos mais flexíveis.

Movimento de deslizamento do modelo musculoesquelético da cobra com quatro grupos musculares. Os arranjos dos grupos de músculos são otimizados para a velocidade de avanço mais rápida. A cor dos grupos musculares indica o nível de contração muscular. Crédito:Nature Communications, doi:10.1038 / s41467-019-12759-5.
Cobras rastejantes de engenharia
A equipe então empregou a abordagem numérica desenvolvida no estudo para facilitar a manufatura do robô bio-híbrido e entender a biomecânica. Os bioengenheiros já haviam realizado vários experimentos sobre a locomoção de cobras para construir réplicas de robôs alvo usando servomotores (atuadores rotativos). No presente experimento, eles desenvolveram uma cobra elástica completamente macia, bioinspirada por cobras reais, mas efetivamente atuada com vários grupos de músculo-tendão para alcançar um movimento ondulatório suave. A equipe de pesquisa mostrou que, embora as cobras biológicas tivessem vários músculos para orquestrar andamentos e deformações corporais, o modelo exigia apenas alguns recursos para deslizar para frente de maneira suave e eficaz.
Para um design ideal, os cientistas acoplaram seu solver computacional ao algoritmo Covariance Matrix Adaptation-Evolution Strategy (CMA-ES) para identificar os locais e padrões de atuação para velocidade máxima de avanço. Zhang et al. comparou e verificou os resultados com simulações de referência e registros experimentais. A equipe teve como objetivo principal revelar os princípios ocultos do projeto arquitetônico e expor sua função para fins de engenharia. Eles orquestraram cuidadosamente a atuação distribuída para movimentos suaves e realistas em forte contraste com os robôs-cobra rígidos. Os pesquisadores também implementaram uma estrutura para simplificar, testar e usar princípios biomecânicos de sistemas biológicos complexos para criar um deslizamento realista, velozes, cobra soft-robótica baseada em alguns atuadores simples.
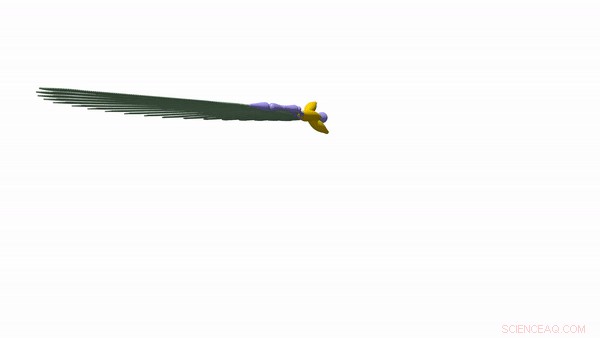
A vista frontal de um par de asas que consiste em 6342 filamentos, onde os filamentos verdes indicam as penas. Um processo de iniciação levanta as asas da posição plana e é seguido por um único movimento de potência para baixo e para cima durante o estágio de decolagem. Crédito:Nature Communications, doi:10.1038 / s41467-019-12759-5.
Asas emplumadas de engenharia
Para demonstrar uma estratégia de locomoção mais complexa que inclui estruturas biológicas adicionais com funções críticas, a equipe desenvolveu um emplumado, asa de ave musculoesquelética em silico. Os bioengenheiros já haviam conduzido uma variedade de estudos para entender as características biofísicas do vôo das aves, desde os padrões de ativação muscular até a biomecânica das penas. No presente trabalho, Zhang et al. considerou a estrutura dinâmica da asa de um pombo e reconstruiu as penas in silico com rigidez à flexão, consistente com estudos anteriores.
No total, eles conectaram 19 penas ao modelo de asa computacional em conformidade com os dados biológicos do pombo-correio. Eles incluíram quatro músculos associados com as articulações do ombro e cotovelo para controlar a atuação da asa e transformação em relação ao modelo de articulação do cotovelo humano. Embora este modelo de estudo não tenha captado a aerodinâmica complexa associada ao vôo oscilante, forneceu uma estimativa preliminar. A equipe reproduziu a cinemática das asas em mutação durante a decolagem e baseou os padrões de atuação muscular em sinais de eletromiografia (EMG) previamente adquiridos.
Desta maneira, Xiaotian Zhang e uma equipe de pesquisadores apresentaram um novo método para montar heterogêneos, hastes de cosserat ativas e passivas para simular dinâmicas, arquiteturas musculoesqueléticas que podem sofrer deformação para facilitar o movimento biomimético. A abordagem abordou uma falta existente de técnicas de engenharia em robótica leve para preencher a lacuna entre a modelagem de corpo rígido e as simulações do método de elementos finitos de alta fidelidade (FEM).
Usando recursos favoráveis desenvolvidos no estudo, a equipe de pesquisa desenvolveu sistemas de corpo mole para resolver uma série de problemas relativos à robótica mole e estruturas biológicas complexas em diversos ambientes. O novo trabalho mostrou a versatilidade da abordagem para estabelecer uma estratégia promissora para uma ampla gama de aplicações em bioengenharia de estruturas inspiradas biologicamente para descobrir as características subjacentes de organismos vivos.
© 2019 Science X Network