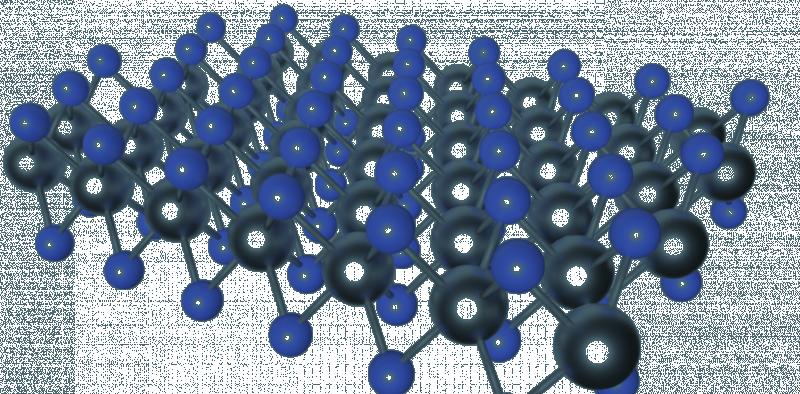
Renderização artística de uma nova geração de biobots - dispositivos robóticos macios movidos por tecido muscular esquelético estimulado por neurônios motores integrados. Crédito:Michael Vincent
Os pesquisadores desenvolveram dispositivos robóticos suaves acionados por tecido neuromuscular que dispara quando estimulado pela luz - trazendo a engenharia mecânica um passo mais perto do desenvolvimento de biobots autônomos.
Em 2014, equipes de pesquisa lideradas pelo professor de ciência mecânica e engenharia Taher Saif e pelo professor de bioengenharia Rashid Bashir da Universidade de Illinois trabalharam juntas para desenvolver os primeiros biobots biohíbridos automotores de natação e caminhada movidos a batidas de células musculares cardíacas derivadas de ratos.
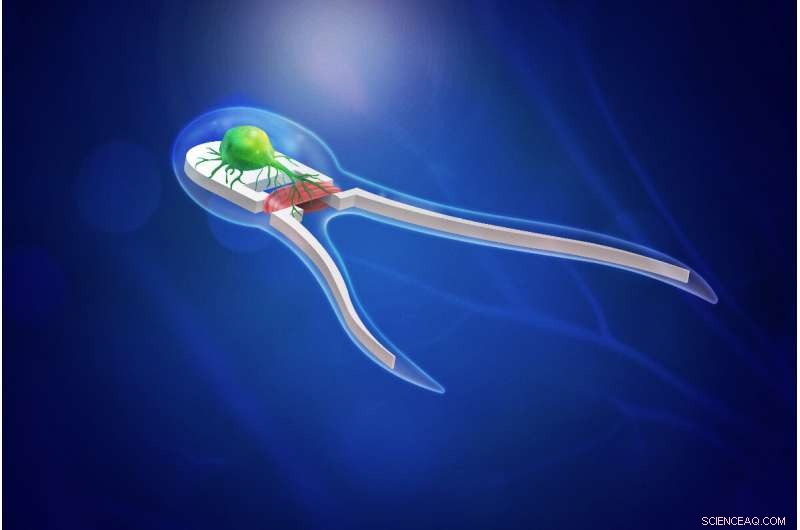
"Nosso primeiro estudo com nadadores demonstrou com sucesso que os bots, modelado a partir de células de esperma, poderia de fato nadar, "Saif disse." Essa geração de robôs de cauda única utilizou tecido cardíaco que bate por conta própria, mas eles não podiam sentir o ambiente ou tomar qualquer decisão. "
Em um novo estudo publicado no Proceedings of the National Academy of Sciences e liderado por Saif, os pesquisadores demonstram uma nova geração de bots de duas caudas alimentados por tecido muscular esquelético estimulado por neurônios motores integrados. Os neurônios têm propriedades optogenéticas:após a exposição à luz, os neurônios irão disparar para acionar os músculos.
"Aplicamos uma cultura de células neuronais optogenéticas, derivado de células-tronco de camundongo, adjacente ao tecido muscular, "Saif disse." Os neurônios avançaram em direção ao músculo e formaram junções neuromusculares, e o nadador montado por conta própria. "
Depois de confirmar que o tecido neuromuscular era compatível com seus esqueletos biobot sintéticos, a equipe trabalhou para otimizar as habilidades do nadador.
A equipe de pesquisa inclui, Da esquerda, professor Taher Saif, estudante de graduação Onur Aydin, estudante de graduação Xiastian Zhang, professor Mattia Gazzola, estudante de graduação Gelson J. Pagan-Diaz, sentado, e professor e reitor da Grainger College of Engineering, Rashid Bashir. Crédito:L. Brian Stauffer
"Usamos modelos computacionais, liderado pela ciência mecânica e professor de engenharia Mattia Gazzola, para determinar quais atributos físicos levariam à natação mais rápida e eficiente, "Saif disse." Por exemplo, olhamos as variações no número de caudas e comprimentos de cauda para o design mais eficiente do nadador biohíbrido. "
"Dado o fato de que os atuadores biológicos, ou biobots, não são tão maduros quanto outras tecnologias, eles são incapazes de produzir grandes forças. Isso torna seu movimento difícil de controlar, "Gazzola disse." É muito importante projetar cuidadosamente o andaime em torno dos quais os biobots crescem e com o qual interagem para tirar o máximo proveito da tecnologia e alcançar as funções da locomotiva. As simulações de computador que executamos desempenham um papel crítico nesta tarefa, pois podemos abranger uma série de designs possíveis e selecionar apenas os mais promissores para teste na vida real. "
"A capacidade de conduzir a atividade muscular com neurônios abre caminho para uma maior integração de unidades neurais dentro de sistemas biohíbridos, "Saif disse." Dada a nossa compreensão do controle neural em animais, pode ser possível avançar com o design neuromuscular biohíbrido usando uma organização hierárquica de redes neurais. "
Saif disse que ele e sua equipe prevêem esse avanço levando ao desenvolvimento de sistemas vivos de engenharia multicelulares, com a capacidade de responder de forma inteligente às sugestões ambientais para aplicações em bioengenharia, medicina e tecnologias de materiais de autocura.
Contudo, a equipe reconhece que - como os organismos vivos - não existem duas máquinas biohíbridas que serão exatamente iguais.
"Assim como gêmeos não são verdadeiramente idênticos, duas máquinas projetadas para realizar a mesma função não serão as mesmas, "Saif disse." Um pode se mover mais rápido ou se curar de danos de forma diferente do outro - um atributo único das máquinas vivas. "