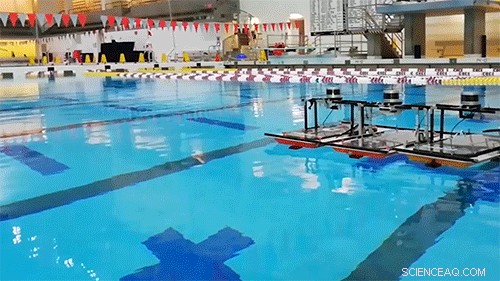
A frota de barcos robóticos do MIT foi atualizada com novos recursos para "mudar de forma, ”Desconectando-se e remontando autonomamente em diferentes configurações para formar várias plataformas flutuantes nos canais de Amsterdã. Em experimentos em uma piscina, os barcos se reorganizaram de uma linha reta conectada em um “L” (mostrado aqui) e outras formas. Crédito:Massachusetts Institute of Technology
A frota de barcos robóticos do MIT foi atualizada com novos recursos para "mudar de forma, "desconectando e remontando de forma autônoma em uma variedade de configurações, para formar estruturas flutuantes nos muitos canais de Amsterdã.
Os barcos autônomos - cascos retangulares equipados com sensores, propulsores, microcontroladores, Módulos GPS, máquinas fotográficas, e outro hardware - estão sendo desenvolvidos como parte do projeto "Roboat" em andamento entre o MIT e o Instituto de Amsterdã para Soluções Metropolitanas Avançadas (Instituto AMS). O projeto é liderado pelos professores do MIT, Carlo Ratti, Daniela Rus, Dennis Frenchman, e Andrew Whittle. No futuro, Amsterdã quer que os roboats cruzem seus 165 canais sinuosos, transportando bens e pessoas, coletando lixo, ou auto-montagem em plataformas "pop-up" - como pontes e palcos - para ajudar a aliviar o congestionamento nas ruas movimentadas da cidade.
Em 2016, Os pesquisadores do MIT testaram um protótipo de robô que poderia avançar, para trás, e lateralmente ao longo de um caminho pré-programado nos canais. Ano passado, pesquisadores projetaram baixo custo, 3-D-impresso, versões em escala de um quarto dos barcos, que eram mais eficientes e ágeis, e vem equipado com algoritmos avançados de rastreamento de trajetória. Em junho, eles criaram um mecanismo de travamento autônomo que permite que os barcos mirem e se prendam uns aos outros, e continue tentando se eles falharem.
Em um novo artigo apresentado no IEEE International Symposium on Multi-Robot and Multi-Agent Systems, os pesquisadores descrevem um algoritmo que permite que os robôs-robô se remodelem suavemente da maneira mais eficiente possível. O algoritmo lida com todo o planejamento e rastreamento que permite que grupos de unidades roboat se desprendam uns dos outros em uma configuração definida, percorrer um caminho livre de colisões, e reconecte ao local apropriado na nova configuração definida.
Em demonstrações em uma piscina do MIT e em simulações de computador, grupos de unidades de roboat vinculadas se reorganizaram de linhas retas ou quadrados em outras configurações, como retângulos e formas em "L". As transformações experimentais levaram apenas alguns minutos. Mudanças de forma mais complexas podem demorar mais, dependendo do número de unidades móveis - que podem ser dezenas - e das diferenças entre as duas formas.
"Permitimos que os roboats agora façam e interrompam conexões com outros roboats, com a esperança de levar atividades nas ruas de Amsterdã para a água, "diz Rus, diretor do Laboratório de Ciência da Computação e Inteligência Artificial (CSAIL) e os Professores Andrew e Erna Viterbi de Engenharia Elétrica e Ciência da Computação. "Um conjunto de barcos pode se unir para formar formas lineares como pontes suspensas, se precisarmos enviar materiais ou pessoas de um lado do canal para o outro. Ou, podemos criar plataformas pop-up mais amplas para mercados de flores ou alimentos. "
Juntando-se à Rus no papel estão:Ratti, diretor do Senseable City Lab do MIT, e, também do laboratório, primeiro autor Banti Gheneti, Ryan Kelly, e Drew Meyers, todos os pesquisadores; pós-doutorado em Shinkyu Park; e pesquisador Pietro Leoni.
Crédito:Massachusetts Institute of Technology
Trajetórias livres de colisão
Por seu trabalho, os pesquisadores tiveram que enfrentar desafios com planejamento autônomo, monitorando, e conectar grupos de unidades roboat. Dando a cada unidade recursos exclusivos para, por exemplo, localizem-se, concordar em como separar e reformar, e, em seguida, mova-se livremente, exigiria técnicas complexas de comunicação e controle que tornariam o movimento ineficiente e lento.
Para permitir operações mais suaves, os pesquisadores desenvolveram dois tipos de unidades:coordenadores e trabalhadores. Um ou mais trabalhadores se conectam a um coordenador para formar uma única entidade, chamada de "plataforma de embarcação conectada" (CVP). Todas as unidades de coordenador e trabalhador têm quatro hélices, um microcontrolador habilitado para wireless, e vários mecanismos de travamento automatizados e sistemas de detecção que permitem que eles se conectem.
Coordenadores, Contudo, também vêm equipados com GPS para navegação, e uma unidade de medição inercial (IMU), que calcula a localização, pose, e velocidade. Os trabalhadores têm apenas atuadores que ajudam o CVP a se orientar ao longo de um caminho. Cada coordenador está ciente e pode se comunicar sem fio com todos os funcionários conectados. Estruturas compreendem vários CVPs, e os CVPs individuais podem se prender uns aos outros para formar uma entidade maior.
Durante a mudança de forma, todos os CVPs conectados em uma estrutura comparam as diferenças geométricas entre sua forma inicial e a nova. Então, cada CVP determina se ele permanece no mesmo lugar e se precisa se mover. Cada CVP em movimento recebe então um tempo para desmontar e uma nova posição na nova forma.
Cada CVP usa uma técnica de planejamento de trajetória personalizada para calcular uma maneira de alcançar sua posição alvo sem interrupção, enquanto otimiza a rota para velocidade. Para fazer isso, cada CVP pré-calcula todas as regiões livres de colisão ao redor do CVP móvel conforme ele gira e se afasta de um estacionário.
Depois de pré-computar essas regiões livres de colisão, o CVP então encontra a trajetória mais curta até seu destino final, que ainda o impede de bater na unidade estacionária. Notavelmente, técnicas de otimização são usadas para tornar todo o processo de planejamento de trajetória muito eficiente, com a pré-computação levando pouco mais de 100 milissegundos para encontrar e refinar os caminhos seguros. Usando dados do GPS e IMU, o coordenador então estima sua pose e velocidade em seu centro de massa, e controla sem fio todas as hélices de cada unidade e se move para o local de destino.
Em seus experimentos, os pesquisadores testaram CVPs de três unidades, composta por um coordenador e dois trabalhadores, em vários cenários de mudança de forma diferentes. Cada cenário envolveu um CVP que se desprendeu da forma inicial e se moveu e se reenviou para um ponto alvo em torno de um segundo CVP.
Três CVPs, por exemplo, reorganizaram-se a partir de uma linha reta conectada - onde eles foram travados juntos em seus lados - em uma linha reta conectada na frente e atrás, bem como um "L." Em simulações de computador, até 12 unidades roboat rearranjadas de, dizer, um retângulo em um quadrado ou de um quadrado sólido em uma forma de Z.
Aumentando a escala
Os experimentos foram realizados em unidades roboat do tamanho de um quarto, que medem cerca de 1 metro de comprimento e meio metro de largura. Mas os pesquisadores acreditam que seu algoritmo de planejamento de trajetória terá uma boa escala no controle de unidades de tamanho normal, que medirá cerca de 4 metros de comprimento e 2 metros de largura.
Em cerca de um ano, os pesquisadores planejam usar os roboats para formar uma "ponte" dinâmica através de um canal de 60 metros entre o Museu de Ciência NEMO no centro da cidade de Amsterdã e uma área que está em desenvolvimento. O projeto, chamado RoundAround, empregará roboats para navegar em um círculo contínuo através do canal, pegando e deixando passageiros nas docas e parando ou redirecionando quando detectam algo no caminho. Atualmente, caminhar ao redor dessa hidrovia leva cerca de 10 minutos, mas a ponte pode reduzir esse tempo para cerca de dois minutos.
“Esta será a primeira ponte do mundo composta por uma frota de barcos autônomos, "Ratti diz." Uma ponte normal seria muito cara, porque você tem barcos passando, então você precisaria ter uma ponte mecânica que se abre ou uma ponte muito alta. Mas podemos conectar os dois lados do canal [usando] barcos autônomos que se tornam dinâmicos, arquitetura responsiva que flutua na água. "
Para alcançar esse objetivo, os pesquisadores estão desenvolvendo ainda mais os roboats para garantir que possam conter pessoas com segurança, e são robustos a todas as condições meteorológicas, como chuva forte. Eles também estão garantindo que os roboats possam se conectar com eficácia às laterais dos canais, que pode variar muito em estrutura e design.
Esta história foi republicada por cortesia do MIT News (web.mit.edu/newsoffice/), um site popular que cobre notícias sobre pesquisas do MIT, inovação e ensino.