Crédito:Obute, Dogar e Boyle.
Muitos animais e microrganismos são capazes de realizar tarefas complexas, como encontrar comida ou construir ninhos, como uma equipe, ou "enxame". Um dos exemplos mais óbvios disso são as abelhas, já que sua sobrevivência como grupo depende fortemente da cooperação com outros membros de sua colônia. Ao longo dos últimos anos, um número crescente de pesquisadores tem tentado reproduzir essa dinâmica de grupo fascinante em robôs, dando origem a uma área de estudo chamada robótica de enxame.
Pesquisadores da Universidade de Leeds apresentaram recentemente uma nova abordagem de robótica de enxame chamada quimiotaxia, inspirado por um comportamento particular observado em microrganismos, . Seu estudo, pré-publicado no arXiv, decorre do interesse dos autores na sobrevivência de animais invertebrados simples em ambientes dinâmicos do mundo real, e como essas estratégias podem ser aplicadas em robôs.
"Durante meu doutorado e minha primeira bolsa de pós-doutorado, Estudei o sistema de locomoção de um pequeno verme chamado C. elegans (um organismo modelo popular), e apliquei com sucesso o que aprendi para controlar a locomoção de um robô semelhante a uma cobra, "Jordan Boyle, um dos pesquisadores que realizou o estudo, disse TechXplore. “O trabalho atual é inspirado no mesmo organismo, mas desta vez, olhando para seu comportamento de nível superior - especificamente a maneira como ele navega em direção às fontes de alimento usando seu olfato. "
Na ausência de entradas sensoriais, C. elegans vermes normalmente avançam, mas faça grandes curvas em intervalos de tempo aleatórios. Se eles sentirem que um cheiro "positivo" está ficando mais forte à medida que se movem em uma determinada direção, a frequência de suas voltas diminui. Inversamente, quando o cheiro "positivo" ou "desejado" fica mais fraco, há uma probabilidade maior de que eles mudem. Esse comportamento, conhecido como quimiotaxia, em última análise, permite que gravitem em direção a locais onde um estímulo sensorial desejado está em seu pico. Em seu estudo, Boyle, seu colega Mehmet Dogar e Ph.D. o aluno Simon Obute decidiu replicar essa estratégia de grupo em enxames robóticos e avaliar sua utilidade.
"Um benefício importante desta estratégia é que ela só precisa de um único sensor analógico, porque gradientes são detectados ao longo do tempo conforme o animal se move, "Boyle explicou." Em nosso trabalho, substituímos o cheiro pelo som, porque é muito mais fácil de criar e sentir com um robô, e também fica mais fraco à medida que você se afasta da fonte, "Boyle explicou." As principais vantagens desta abordagem é que ela permite que um grupo de robôs de enxame seja confinado a uma área específica (ou seja, em torno de uma fonte de som) sem a necessidade de um limite físico, capacidade de mapeamento ou sistemas sensoriais complexos. "
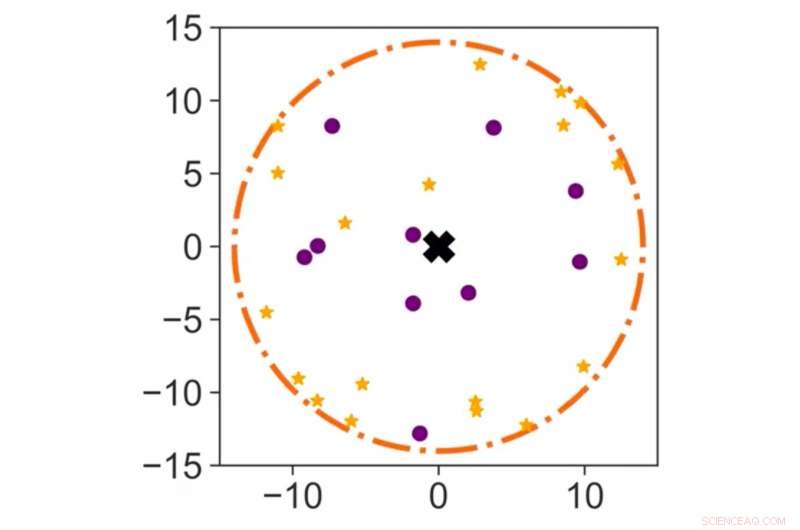
Usando um algoritmo desenvolvido por eles, os pesquisadores aplicaram quimiotaxia a um enxame de robôs de exploração, em última análise, levando-os a retornar a uma determinada área de trabalho ao redor de seu ninho, situada em um ambiente ilimitado. Eles testaram seu desempenho, e, portanto, a eficácia de sua abordagem, em uma série de experiências de simulação e validação de hardware. Embora seus resultados sejam baseados principalmente em simulações e não em implementações do mundo real, os pesquisadores descobriram que conseguiram incorporar modelos precisos de propagação de som.
"Nossos resultados de hardware são preliminares, mas promissores neste momento, "Boyle disse." Em última análise, este trabalho pode ser relevante para enxames físicos consistindo de muito pequenos, robôs baratos com capacidades sensoriais e computacionais limitadas. Embora prático, a implantação de enxames de robôs no mundo real ainda está um pouco distante, eles têm potencial em muitas aplicações. "
No futuro, experimentos com robôs reais podem ajudar a determinar a eficácia dessa nova abordagem bioinspirada. Se esses testes produzirem resultados positivos, o algoritmo desenvolvido por Boyle e seus colegas poderia eventualmente ser usado para aprimorar as estratégias de navegação e orientação de enxames robóticos, particularmente quando os ambientes em que estão navegando não estão claramente mapeados ou definidos.
Obute agora está trabalhando na integração da quimiotaxia em sistemas robóticos de enxame mais complexos, em simulações, bem como em alguns experimentos de hardware. Seu doutorado final O projeto investiga especificamente a possibilidade de usar robôs de enxame para a coleta de lixo urbano. Boyle, por outro lado, planeja continuar explorando estratégias biológicas que podem ser particularmente úteis para aplicações de robótica.
"Atualmente, I'm interested in applying similar techniques to a major project I'm involved in that aims to develop robot systems for monitoring the integrity of sewer and water distribution networks, " Boyle said.
© 2019 Science X Network