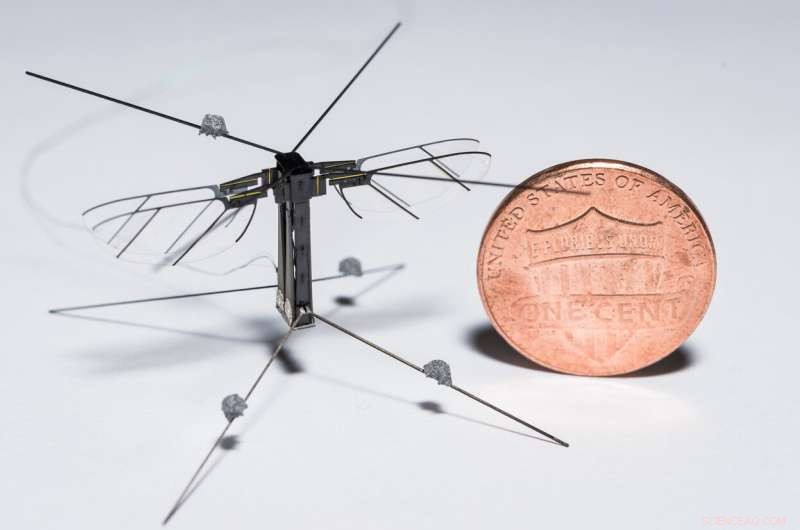
 p Inseto robótico voador Bee +. Crédito:Xiufeng Yang.
p Inseto robótico voador Bee +. Crédito:Xiufeng Yang.
p Um dos principais problemas que os pesquisadores enfrentam no campo da microrrobótica é projetar e implementar controladores confiáveis para micro-veículos aéreos em escala de insetos (FWMAVs), que são minúsculos robôs voadores tipicamente inspirados por insetos. Na verdade, embora esses robôs do tamanho de insetos possam ter inúmeras aplicações úteis, por exemplo, auxiliando humanos em missões de busca e resgate ou na agricultura, desenvolver controladores que correspondam a seu tamanho e estrutura tem se mostrado difícil até agora. p Pesquisadores da University of Southern California (USC) realizaram recentemente um estudo explorando os desafios no projeto desses controladores. Em seu jornal, pré-publicado no arXiv, eles introduzem uma nova abordagem unificadora que pode informar o desenvolvimento de técnicas mais eficazes para o controle de FWMAVs. Os pesquisadores por trás do estudo fazem parte do laboratório de sistemas microrobóticos autônomos (AMSL), que é o herdeiro de uma linha de pesquisa que começou na UC Berkeley há mais de 20 anos, continuou em Harvard a partir de 2005 e chegou à USC em 2013.
p "Nós, como uma equipe, compartilham o mesmo sonho de muitos na comunidade microrobótica; a visão de criar insetos artificiais totalmente autônomos que podem operar de forma inteligente em ambientes altamente desestruturados, "Prof. Nestor O Perez-Arancibia, o investigador principal (PI) do estudo, disse TechXplore. "Pessoalmente, Eu sou inspirado pela natureza. Nossas máquinas, incluindo Bee +, que é uma incrível peça de engenharia, ainda estão atrás de insetos reais em termos de capacidades acrobáticas, atuação, de detecção, poder computacional, etc. "
p Perez-Arancibia conduz pesquisas em sistemas microrobóticos há vários anos. Ele acredita que todas as máquinas feitas pelo homem poderiam, em última análise, ser melhoradas se inspirando-se na natureza, por exemplo, observando e replicando o comportamento ou características das abelhas, borboletas e mosquitos.
 p Inseto robótico voador Bee +. Crédito:Xiufeng Yang.
p Inseto robótico voador Bee +. Crédito:Xiufeng Yang.
p Em seu estudo, Perez-Arancibia e seus colegas investigaram o controle de insetos voadores usando duas plataformas experimentais diferentes:um robô de duas asas parecido com uma abelha e o micorobô Bee + de quatro asas desenvolvido na USC. Em uma série de experimentos, eles foram capazes de demonstrar que uma técnica que emprega coordenadas de quaternion para controle de atitude, que é projetado para controlar veículos não tripulados com quatro rotores, pode ser aplicado para conduzir esses dois insetos robóticos.
p "Conseguimos simplificar algo que muitos pesquisadores consideram muito difícil, "Perez-Arancibia disse." Gosto de acreditar que este é um caso em que a modelagem inteligente (ou seja, olhando para o problema de uma perspectiva nova e "melhor"), podemos compreender e analisar fenômenos complexos aparentemente intratáveis que podem nos ajudar a desenvolver projetos robóticos melhores, especialmente em termos de geração de força aerodinâmica, configuração e atuação do mecanismo. "
p Os resultados dos testes realizados por Perez-Arancibia e seus colegas sugerem que a estratégia genérica que eles introduziram poderia ser usada para controlar diferentes tipos de insetos artificiais que compartilham algumas características comuns. Embora tenham demonstrado especificamente a eficácia dessa estratégia em um robô de duas asas e no robô Bee + de quatro asas, também poderia ser potencialmente aplicado a outros microrrobôs semelhantes a insetos.
p Perez-Arancibia acredita que, ao seguir uma abordagem de controle de alto nível que desacopla os problemas de acionamento e controle de voo, é possível identificar algoritmos gerais que podem ser empregados em múltiplas plataformas. Por exemplo, esta abordagem pode permitir que os pesquisadores desenvolvam novos algoritmos para vôo acrobático empregando quadrotores de 19 gramas que podem ser posteriormente implementados em 95 miligramas, Bee + de quatro asas.
Crédito:Xiufeng Yang. p "Isso é relevante porque, à medida que os panfletos robóticos ficam menores, eles também se tornam mais difíceis de fabricar, mais difícil de manusear e mais caro, "Perez-Arancibia disse." Consequentemente, como mostrado em nosso artigo, o fato de que a mesma abordagem pode ser empregada para sintetizar controladores para plataformas com diferenças de peso tão grandes quanto duas ordens de magnitude é significativo e relevante de ambas as perspectivas de pesquisa e prática. "
p No futuro, a abordagem introduzida por esta equipe de pesquisadores da USC poderia informar o projeto e a implementação de novos controladores para microrrobôs semelhantes a insetos. Além disso, nos próximos meses, Perez-Arancibia e seus colegas trabalharão em um projeto diferente com o objetivo de criar o primeiro subgrama totalmente autônomo de inseto artificial voador.
p "Atualmente, a principal limitação que tem impedido os microroboticistas de alcançar o vôo autônomo na escala de subgrama são as densidades de energia extremamente baixas das baterias elétricas, ", Disse Perez-Arancibia." Alcançaremos autonomia empregando músculos artificiais acionados por reações catalíticas ". p © 2019 Science X Network