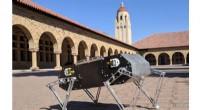
O autor principal Joseph DelPreto demonstra a capacidade do sistema de espelhar seus movimentos, monitorando a atividade muscular. Crédito:Joseph DelPreto / MIT CSAIL
Nós, humanos, somos muito bons em colaboração. Por exemplo, quando duas pessoas trabalham juntas para carregar um objeto pesado como uma mesa ou um sofá, eles tendem a coordenar instintivamente seus movimentos, constantemente recalibrando para ter certeza de que suas mãos estão na mesma altura que as da outra pessoa. Nossa habilidade natural de fazer esses tipos de ajustes nos permite colaborar em tarefas grandes e pequenas.
Mas um computador ou um robô ainda não consegue seguir o exemplo de um humano com facilidade. Normalmente, ou os programamos explicitamente usando linguagem de máquina, ou treiná-los para entender nossas palavras, à la assistentes virtuais como Siri ou Alexa.
Em contraste, pesquisadores do Laboratório de Ciência da Computação e Inteligência Artificial do MIT (CSAIL) mostraram recentemente que uma colaboração robô-humano mais suave é possível por meio de um novo sistema que desenvolveram, onde as máquinas ajudam as pessoas a levantar objetos, monitorando seus movimentos musculares.
Batizado de RoboRaise, o sistema envolve colocar sensores de eletromiografia (EMG) no bíceps e tríceps do usuário para monitorar a atividade muscular. Seus algoritmos então detectam continuamente mudanças no nível do braço da pessoa, bem como gestos manuais discretos para cima e para baixo que o usuário pode fazer para um controle motor mais preciso.
A equipe usou o sistema para uma série de tarefas envolvendo a coleta e montagem de componentes de aviões de simulação. Em experimentos, os usuários trabalharam nessas tarefas com o robô e foram capazes de controlá-lo até alguns centímetros da altura desejada levantando e tensionando o braço. Era mais preciso quando os gestos eram usados, e o robô respondeu corretamente a cerca de 70 por cento de todos os gestos.
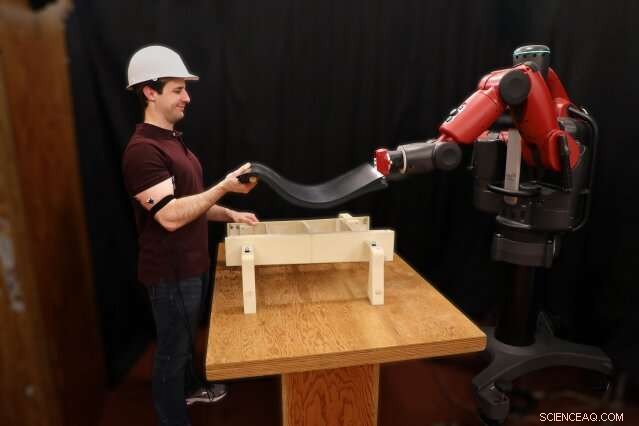
O autor principal Joseph DelPreto demonstra a capacidade do sistema de espelhar seus movimentos, monitorando a atividade muscular. Crédito:Joseph DelPreto / MIT CSAIL
O estudante de graduação Joseph DelPreto diz que pode imaginar pessoas usando RoboRaise para ajudar nas configurações de fabricação e construção, ou mesmo como assistente em casa.
"Nossa abordagem para levantar objetos com um robô visa ser intuitiva e semelhante a como você pode levantar algo com outra pessoa - copiando aproximadamente os movimentos uns dos outros enquanto infere ajustes úteis, "diz DelPreto, autor principal de um novo artigo sobre o projeto com a professora do MIT e diretora do CSAIL, Daniela Rus. "O insight principal é usar pistas não verbais que codificam instruções de como coordenar, por exemplo, para levantar um pouco mais alto ou mais baixo. Usar sinais musculares para se comunicar quase torna o robô uma extensão de si mesmo que você pode controlar com fluidez. "
O projeto se baseia no sistema existente da equipe que permite aos usuários corrigir instantaneamente os erros do robô com ondas cerebrais e gestos com as mãos, agora permitindo o movimento contínuo de uma forma mais colaborativa. "Nosso objetivo é desenvolver a interação humano-robô onde o robô se adapta ao ser humano, em vez do contrário. Dessa forma, o robô se torna uma ferramenta inteligente para o trabalho físico, "diz Rus.
Os sinais EMG podem ser complicados de trabalhar:costumam ser muito barulhentos, e pode ser difícil prever exatamente como um membro está se movendo com base na atividade muscular. Mesmo que você possa estimar como uma pessoa está se movendo, como você deseja que o próprio robô responda pode não estar claro.
RoboRaise contorna isso colocando o humano no controle. O sistema da equipe usa não invasivo, sensores corporais que detectam o disparo de neurônios conforme você tensiona ou relaxa os músculos. O uso de wearables também contorna problemas de oclusão ou ruído ambiente, o que pode complicar as tarefas que envolvem a visão ou a fala.
O algoritmo do RoboRaise então processa a atividade do bíceps para estimar como o braço da pessoa está se movendo para que o robô possa imitá-lo de forma aproximada, e a pessoa pode ficar ligeiramente tensa ou relaxar o braço para mover o robô para cima ou para baixo. Se um usuário precisa que o robô se afaste mais de sua posição ou mantenha uma pose por um tempo, eles podem apenas gesticular para cima ou para baixo para um controle mais preciso; uma rede neural detecta esses gestos a qualquer momento com base na atividade do bíceps e tríceps.
Um novo usuário pode começar a usar o sistema muito rapidamente, com calibração mínima. Depois de colocar os sensores, eles só precisam tensionar e relaxar o braço algumas vezes e, em seguida, levantar um peso leve até algumas alturas. A rede neural que detecta gestos é treinada apenas com dados de usuários anteriores.
A equipe testou o sistema com 10 usuários por meio de uma série de três experimentos de levantamento:um em que o robô não se moveu, outro em que o robô se moveu em resposta aos músculos, mas não ajudou a levantar o objeto, e uma terceira onde o robô e a pessoa levantaram um objeto juntos.
Quando a pessoa tinha feedback do robô - quando ela podia vê-lo se movendo ou quando estava levantando algo juntos - a altura alcançada era significativamente mais precisa do que não ter nenhum feedback.
A equipe também testou o RoboRaise em tarefas de montagem, como levantar uma folha de borracha em uma estrutura de base. Ele foi capaz de levantar objetos rígidos e flexíveis até as bases. RoboRaise foi implementado no robô humanóide Baxter da equipe, mas a equipe diz que pode ser adaptado para qualquer plataforma robótica.
No futuro, a equipe espera que adicionar mais músculos ou diferentes tipos de sensores ao sistema aumente os graus de liberdade, com o objetivo final de realizar tarefas ainda mais complexas. Sinais como esforço ou fadiga decorrentes da atividade muscular também podem ajudar os robôs a fornecer uma assistência mais intuitiva. A equipe testou uma versão do sistema que usa os níveis de bíceps e tríceps para dizer ao robô com que força a pessoa está segurando a ponta do objeto; juntos, o ser humano e a máquina podem arrastar um objeto com fluidez ou puxá-lo com firmeza.
Esta história foi republicada por cortesia do MIT News (web.mit.edu/newsoffice/), um site popular que cobre notícias sobre pesquisas do MIT, inovação e ensino.