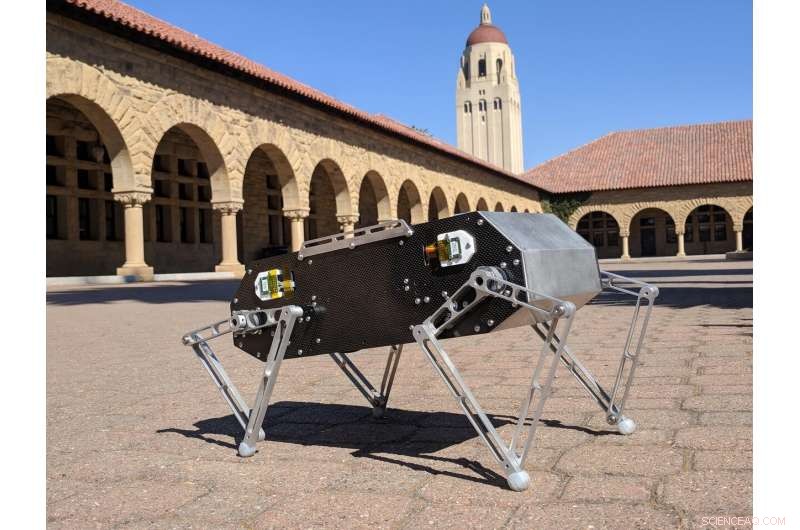
Stanford Doggo. Crédito:Kau et al.
Pesquisadores da Universidade de Stanford criaram recentemente um robô quadrúpede de código aberto chamado Stanford Doggo. Seu robô, apresentado em artigo pré-publicado no arXiv e previsto para ser publicado por IEEE Explore , excede o desempenho de muitos robôs de pernas de última geração em agilidade de salto vertical.
"Cerca de um ano e meio atrás, Comecei a subequipe de Mobilidade Extrema na Stanford Student Robotics, "Nathan Kau, um dos pesquisadores que realizou o estudo, disse TechXplore. "Estávamos interessados em construir robôs ágeis que pudessem explorar ambientes onde veículos com rodas ou voadores não seriam eficazes. Já existem alguns robôs realmente incríveis que podem trabalhar nesses tipos de ambiente, mas eram muito caros, designs personalizados que não poderíamos replicar. Então, no ano passado, decidimos projetar e prototipar um robô de quatro patas barato inspirado por esses grupos, e Stanford Doggo é o resultado de nossos esforços. "
O robô desenvolvido por Kau e seus colegas tem quatro pernas, cada um deles é movido por dois motores. As unidades de correia conectam os motores aos eixos das articulações das pernas, o que faz os links girarem a um terço da velocidade dos motores. Esta redução de velocidade quase triplica o torque, e a proporção é baixa o suficiente para garantir que as forças do ambiente sejam detectadas pelo motor.
"Este efeito é semelhante a andar de bicicleta em marcha baixa, e é mais fácil sentir solavancos na estrada em seus pés do que em marcha alta, "Kau explicou." Esses tipos de mecanismos, chamados de atuadores de acionamento quase direto, são um tanto comuns agora em robôs com pernas. Contudo, descobrimos que poucos ou nenhum grupo estava usando este tipo de atuador em menores, robôs ambulantes de baixo custo. "
Stanford Doggo é um robô altamente ágil e barato que pode ser facilmente replicado. Notavelmente, o robô estabeleceu um novo recorde de agilidade de salto vertical entre qualquer robô ou animal, dobrando a altura de salto dos robôs quadrúpedes anteriores. Stanford Doggo também é muito mais barato do que outros robôs com pernas, que normalmente custam dezenas ou centenas de milhares de dólares.
"No total, Stanford Doggo custa cerca de US $ 3.000 para construir, incluindo todos os custos de fabricação em que você incorreria se não tivesse máquinas-ferramentas caras, como fresas ou tornos, "Kau disse." O baixo custo significa que o robô é mais acessível para os outros, especialmente se eles não estiverem em um laboratório universitário. Seu recurso mais importante, Contudo, é que ele roda em hardware e software de código aberto e lançamos planos detalhados, listas de peças e instruções. "
Em uma série de avaliações realizadas por Kau e seus colegas, Stanford superou outros robôs quadrúpedes por uma margem significativa. Sua agilidade de salto vertical, uma medida da velocidade vertical média, combinou com o do animal mais ágil e ultrapassou o do robô com pernas de melhor desempenho em 22 por cento. Vários outros robôs interessantes estão sendo desenvolvidos, logo, os títulos de Stanford Doggo podem mudar. Apesar disso, sua agilidade de salto vertical permanece altamente notável.
"Esperamos que mais e mais laboratórios sejam capazes de testar novas técnicas de controle usando nosso robô como plataforma, "Kau disse." Achamos que, se mais pessoas estiverem trabalhando nesses tipos de robôs, eles ficarão prontos mais rapidamente para aplicações do mundo real, como entrega de suprimentos essenciais ou busca e resgate. Também esperamos que nosso robô inspire os alunos a começar a explorar o campo da robótica com pernas. Geralmente é uma área cara da robótica para trabalhar, portanto, esperamos que Stanford Doggo diminua a barreira de entrada. "
Kau e seus colegas tiveram sucesso no desenvolvimento do primeiro robô quadrúpede altamente ágil e barato projetado para aplicações de pesquisa. Stanford Doggo é totalmente de código aberto e é construído usando muito poucas peças personalizadas, portanto, pode ser facilmente recriado. Os pesquisadores esperam que outras equipes de robótica desenvolvam e aprimorem seu robô, progredindo ainda mais em suas pesquisas.
Kau e seus colegas também estão trabalhando em uma versão maior do Stanford Doggo, chamado Stanford Woofer. Stanford Woofer tem cerca de duas vezes o tamanho do Doggo e pode transportar cerca de 6 kg de equipamento adicional, como sensores e um braço robótico.
"Stanford Doggo ainda é um projeto em andamento, "Kau acrescentou." Por exemplo, estamos trabalhando para incorporar um conjunto completo de sensores ao robô, incluindo LIDAR. Outro subprojeto é fazer com que o robô pareça um pouco menos simples e mais acessível, especialmente porque pensamos que esta poderia ser uma plataforma eficaz para educação e divulgação. Também estamos escrevendo um Instructable abrangente para complementar nossos materiais de código aberto existentes, que fornece instruções passo a passo sobre como construir seu próprio Stanford Doggo. "
© 2019 Science X Network