Ilustração do robô usado pelos pesquisadores. Crédito:Nordmoen et al.
Um dos principais desafios para a pesquisa robótica é o desenvolvimento de sistemas de controle eficazes e resilientes, que permitem que os robôs naveguem em uma variedade de ambientes e lidem com eventos inesperados. Pesquisadores da Universidade de Oslo desenvolveram recentemente uma técnica de coordenação de fase incorporada para uma robusta locomoção de robôs quadrúpedes. Trabalho deles, publicado no arXiv, foi parcialmente patrocinado pelo Conselho de Pesquisa da Noruega.
"O fator motivador para nós foi a observação de que alguns comportamentos do robô que treinamos na simulação não funcionaram corretamente quando testados no robô real, "Jørgen Nordmoen, um dos pesquisadores envolvidos no estudo, disse TechXplore. "Esta observação é um desafio conhecido, frequentemente chamado de 'lacuna da realidade, 'e queríamos ver se o uso de dados do sensor poderia ajudar a superar esse desafio. "
Para efetivamente reduzir a 'lacuna de realidade' que é frequentemente observada em estudos de robótica, Nordmoen e seus colegas queriam combinar geradores de padrão central (CPGs) com feedback do corpo do robô e sensores. CPGs são um método popular para gerar ondulações rítmicas ou padrões motores em robôs, que pode ser usado como a base do movimento. CPGs artificiais são inspirados na medula espinhal de animais, que são conhecidos por conter neurônios que geram sinais rítmicos na ausência de informações sensoriais.
"Os CPGs são relativamente simples de treinar, Contudo, eles não incorporam por si próprios nenhuma informação sobre o mundo exterior, "Nordmoen disse." Nossos principais objetivos eram ver se poderíamos combinar com sucesso uma rede CPG complexa com coordenação de fase incorporada e se a incorporação de dados do sensor poderia melhorar como o robô se comportava no mundo real. "
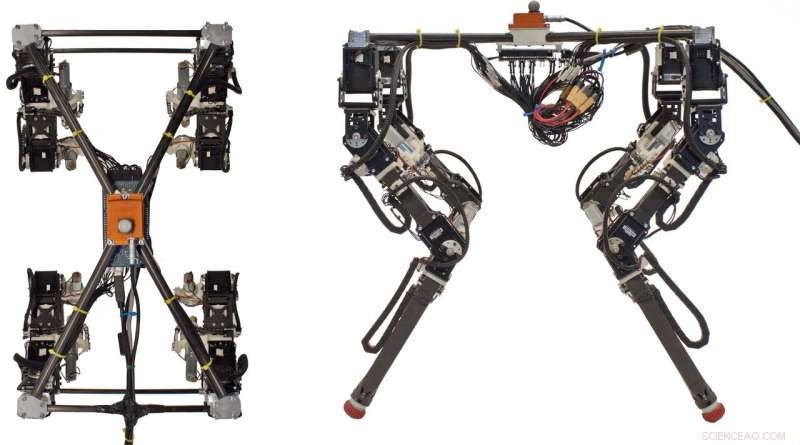
Imagens do robô utilizadas pelos pesquisadores. Crédito:Nordmoen et al.
As técnicas de coordenação de fase incorporadas funcionam detectando a quantidade de pressão colocada pelo robô em cada um de seus pés, usando esta medição para controlar a sincronização de suas pernas. Em seu estudo, os pesquisadores empregaram uma abordagem minimalista chamada TEGOTAE, que usa feedback de sensor para acoplamento de fase emergente entre as pernas do robô.
Usualmente, em robôs com pernas, cada perna é explicitamente coordenada com as outras, o que significa que uma perna sempre sabe a posição relativa das outras pernas. Em contraste, na abordagem de coordenação de fase incorporada desenvolvida por Nordmoen e seus colegas, cada perna é desacoplada das outras e o próprio corpo impõe implicitamente a sincronização entre as pernas. O sensor de pressão do pé adicionado pelos pesquisadores permite a sincronização implícita, em última análise, melhorando a coordenação do robô.
"Nosso método usa um CPG mais complexo do que outras abordagens, utilizando a coordenação de fase incorporada e realizando os experimentos em um robô mais complexo, "Nordmoen disse." Além disso, treinamos o CPG usando um algoritmo de otimização evolutiva, que, juntamente com a coordenação de fase incorporada, permite que o ritmo de caminhada se adapte automaticamente ao robô e ao ambiente. "
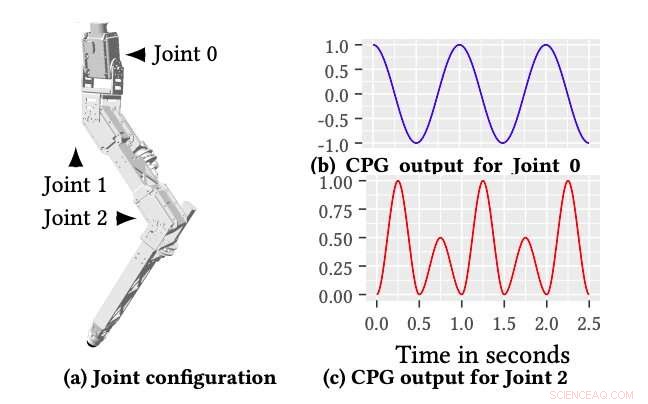
(a) mostra uma representação visual de uma perna do robô com as juntas marcadas. (b) mostra uma curva de controle de exemplo para Joint 0 e Joint 1 enquanto (c) mostra uma curva de controle de exemplo para Joint 2. Crédito:Nordmoen et al.
Em seu estudo, os pesquisadores aplicaram seu método ao DyRET, um robô de quatro patas com morfologia de mamífero. Eles primeiro treinaram o robô quadrúpede em simulações, e posteriormente transferiu seus testes para o mundo real para verificar se o treinamento foi eficaz. Isso permitiu que eles avaliassem sua técnica antes de aplicá-la em cenários do mundo real, sem causar danos ao robô.
"Em termos práticos, nosso trabalho pode levar a robôs com pernas que se adaptam melhor ao ambiente, lidando assim com diferentes ambientes, "Nordmoen disse." Isso inclui facilitar a transferência de controladores de robôs da simulação para o mundo real. Como escrevemos no jornal, robôs com pernas têm a possibilidade de ajudar nos termos do usuário com pouco na forma de ajuste necessário do usuário em comparação com os robôs com rodas. "
A técnica idealizada por Nordmoen e seus colegas poderia facilitar o desenvolvimento de robôs com habilidades de locomoção mais robustas. No futuro, outros pesquisadores podem integrar a abordagem em seus robôs ou se inspirar neste estudo para desenvolver técnicas semelhantes. De acordo com Nordmoen, as dificuldades associadas à integração do feedback do sensor em robôs com pernas e a simplicidade desta nova abordagem de coordenação de fase incorporada podem ser um ótimo ponto de partida para pesquisas futuras.
"Atualmente, estamos trabalhando para compreender melhor o mecanismo que fundamenta a coordenação da fase incorporada, ", acrescentou." Esperamos que isso nos permita melhorar o conceito e gerar melhores estratégias de movimento. Além disso, gostaríamos de ver como a coordenação de fase incorporada é afetada se o próprio robô mudar. Com nosso robô único, DyRET, temos a capacidade de alterar a morfologia do robô e podemos testar como tais mudanças influenciariam nossa abordagem. "
© 2019 Science X Network