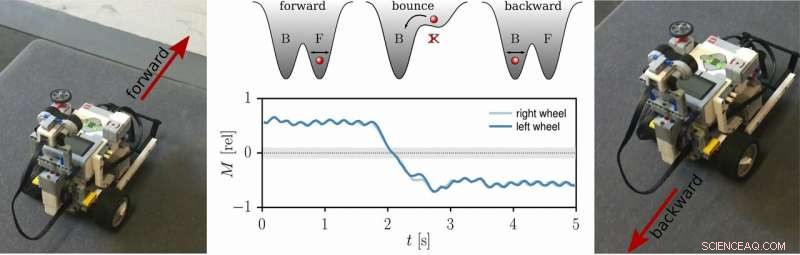
 p Retratando como o robô muda autonomamente as direções de locomoção ao bater em uma parede. Crédito:Sándor et al.
p Retratando como o robô muda autonomamente as direções de locomoção ao bater em uma parede. Crédito:Sándor et al.
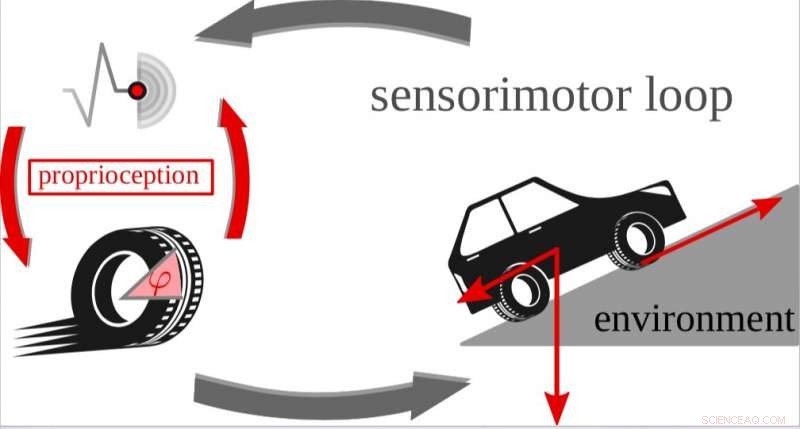
p Uma equipe de pesquisadores da Babes-Bolyai University, Na Roménia, e a Goethe University Frankfurt colaboraram recentemente em um estudo que explora implementações de controle de chute em robôs com rodas simulados e reais. O termo 'controle de chute' refere-se a curto, comandos de ordem superior que podem ser usados para 'chutar' um sistema de um atrator auto-organizado para a bacia de atração de outro atrator. p "Quando nos mudamos, nossos músculos apenas reagem aos sinais que o cérebro envia, ou eles levam em consideração também o estado das articulações, dos tendões e dos próprios músculos? "perguntou Claudius Gros, um dos pesquisadores que realizaram o estudo. “Fala-se de 'locomoção corporificada, 'se este for o caso. Nossa pesquisa é dedicada a investigar como a incorporação ajuda animais e robôs a navegar pelo mundo. "
p Na natureza, mesmo animais com sistema nervoso simples podem navegar em uma variedade de ambientes complexos. Para mover-se em ambientes conhecidos e desconhecidos, os robôs devem ter habilidades sensório-motoras semelhantes. Até aqui, Contudo, cientistas e engenheiros de todo o mundo têm se esforçado para projetar robôs com capacidades motoras semelhantes às de humanos e animais.
p "Coordenar um grande número de atuadores em um ambiente em constante mudança é certamente uma tarefa desafiadora, "Bulcsú Sándor, outro pesquisador envolvido no estudo, disse TechXplore. "Então, por que não deixamos o corpo do robô fazer o trabalho pesado, assumindo uma parte substancial do cálculo? Seguindo essa ideia, sugerimos um esquema de controle alternativo no qual os padrões de movimento são gerados de maneira auto-organizada. Nesta estrutura, a locomoção é criada por meio de uma interação dinâmica entre o cérebro e o corpo do robô, e o meio ambiente. "
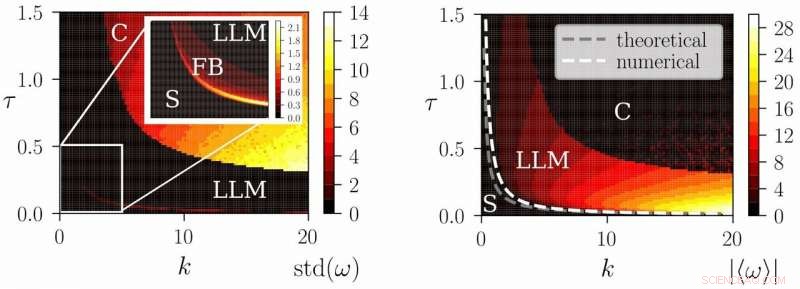 p Diagrama de fases do sistema:comportamentos dinâmicos em função dos parâmetros do controlador.
p Diagrama de fases do sistema:comportamentos dinâmicos em função dos parâmetros do controlador.
p Sándor, Gros e seus colegas desenvolveram uma estrutura de controle em que os movimentos não são rigidamente definidos, mas sim são descritos por um conjunto de equações para controlar atuadores que estão mudando dinamicamente, incorporando as informações proprio-sensoriais do corpo. Eles então testaram e refinaram essas equações no ambiente de simulação LPZRobots.
p “Devido à interação do robô com seu ambiente, vários padrões de movimento auto-organizados podem ser criados, "Disse Sándor." Isso nos permite alternar entre esses primitivos comportamentais por um sinal de controle semelhante a um chute bem definido. Isso é o que chamamos de `controle de chute`. Finalmente, como uma prova de conceito, implementamos essa ideia em robôs com rodas do mundo real. "
p Coordenar a contração de muitos músculos do corpo é uma tarefa muito desafiadora, que é inatamente adquirido pela maioria dos humanos e animais. Em seu estudo, Sándor, Gros e seus colegas tentaram criar um método mais fácil para incutir habilidades motoras em robôs.
-
 p Esboço de um circuito sensorimotor compatível, capaz de se adaptar ao ambiente. Crédito:Sándor et al.
p Esboço de um circuito sensorimotor compatível, capaz de se adaptar ao ambiente. Crédito:Sándor et al.
-
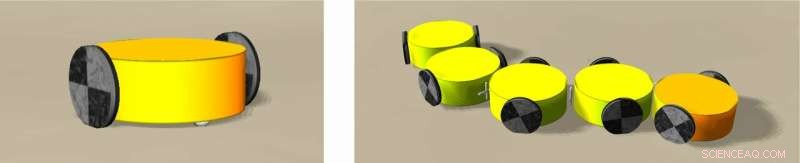 p Robôs simulados (um carro, 5 carros conectados em um trem). Crédito:Sándor et al.
p Robôs simulados (um carro, 5 carros conectados em um trem). Crédito:Sándor et al.
-
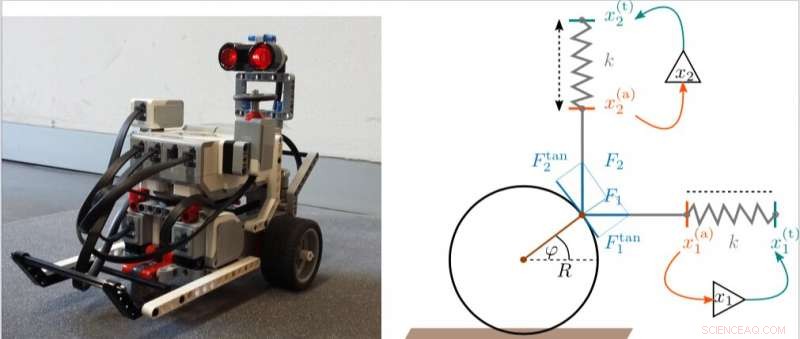 p Robô Lego e o mecanismo controlador que usamos. Crédito:Sándor et al.
p Robô Lego e o mecanismo controlador que usamos. Crédito:Sándor et al.
-
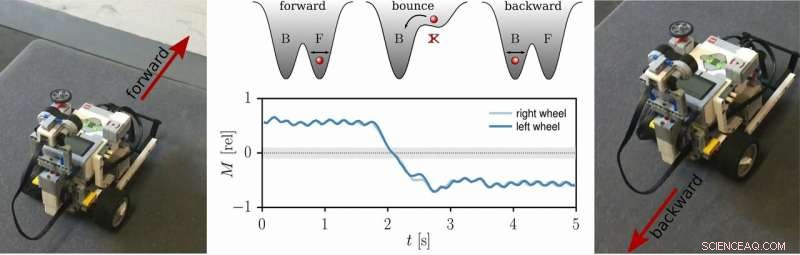 p Retratando como o robô muda autonomamente as direções de locomoção ao bater em uma parede. Crédito:Sándor et al.
p Retratando como o robô muda autonomamente as direções de locomoção ao bater em uma parede. Crédito:Sándor et al.
p "Não seria muito mais simples se o cérebro desse apenas um sinal de chute curto e o corpo de um animal ou robô realizasse um movimento bem coordenado por si mesmo?" Disse Gros. "Esta é a ideia-chave por trás do controle de chute. Isso pode ser realizado, como descobrimos, quando o robô descarta atuadores auto-organizados. "
p Os pesquisadores avaliaram sua estrutura em robôs com rodas simulados e reais, gerar a dinâmica de rodas distintas de forma independente por meio de loops de feedback locais. Esses loops de feedback são mediados por neurônios de codificação de taxa, que processa entradas propriossensoriais que descrevem o ângulo de rotação real de cada roda. Subseqüentemente, uma haste de transmissão simulada que se assemelha àquelas usadas em locomotivas a vapor traduz as mudanças na atividade neural em um movimento de rotação.
Crédito:Claudius Gros p "Demonstramos como os padrões de movimento auto-organizados podem ser usados para gerar locomoção incorporada, "Sándor disse." Usar este esquema de controle pode ajudar a simplificar cálculos complexos que precisam ser realizados para completar várias tarefas de locomoção. Combiná-lo com outros métodos pode levar a ferramentas poderosas para gerar comportamentos robóticos complexos. Nossa estrutura também pode contribuir para a compreensão da locomoção animal e humana. "
p O estudo realizado por Sándor, Gros e seus colegas podem levar a uma nova técnica para controlar com eficiência os movimentos dos robôs. A principal vantagem prática de seu framework é que ele aloca parte da carga computacional para o corpo do robô. Seu modelo também pode ser usado para ensinar sistemas dinâmicos em cursos de física do ensino médio, uma vez que permite demonstrações interativas e envolventes.
p Os pesquisadores agora planejam testar seus algoritmos em arquiteturas de robótica mais complexas, incorporando diferentes modalidades sensoriais em suas equações. Por exemplo, eles poderiam aplicar controle de chute a uma organização hierárquica de controladores, em que a informação visual aciona um modo particular de locomoção.
Crédito:Claudius Gros p "Atualmente, estamos trabalhando para generalizar nossos princípios para robôs com pernas, em particular hexapods, e nossos primeiros resultados são promissores, "Gros disse." Também estamos investigando a ativação do controle de chute por meio de informações sensoriais. " p © 2019 Science X Network