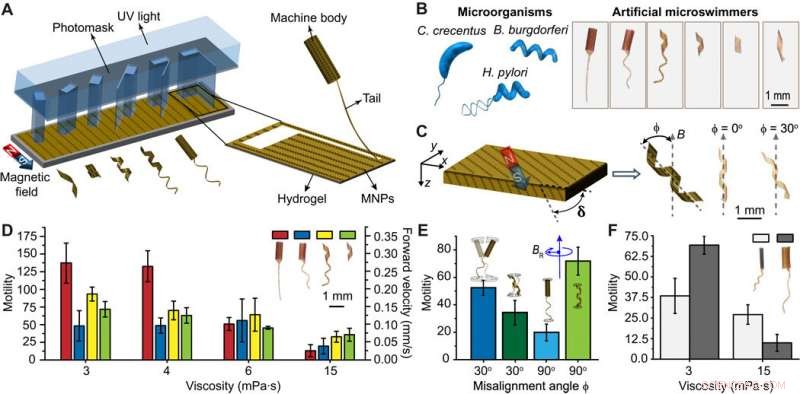
 p (A) Uma abordagem kirigami para a construção de micro-nadadores macios personalizados em massa por meio de uma fotolitografia de etapa única. UV, ultravioleta. (B) Ilustração esquemática das bactérias tomadas como inspiração para este estudo e as imagens ópticas dos micro-nadadores artificiais projetados. (C) Alinhamento fora do plano (δ ≠ 0) de MNPs leva a um ângulo de desalinhamento diferente de zero (ϕ). As imagens ópticas mostrando dois nadadores com formas idênticas e variando ϕ são mostradas. (D) Uma comparação da motilidade de micro-nadadores nadando em fluidos com diferentes viscosidades. (E) Motilidade dos micro-nadadores tubulares flagelados e micro-nadadores helicoidais codificados com duas anisotropias magnéticas diferentes girando em uma solução com uma viscosidade de 3 mPa · s. (F) Efeito do tamanho do corpo na motilidade dos micro nadadores tubulares. Os nadadores foram conduzidos a 2 Hz com uma força de campo de 20 mT em todos os experimentos, a menos que seja afirmado o contrário. Todos os gráficos de barras representam a média ± SEM (n =6 medições para cada micro-nadador e três nadadores diferentes testados por condição). Crédito:Science Advances, doi:10.1126 / sciadv.aau1532
p (A) Uma abordagem kirigami para a construção de micro-nadadores macios personalizados em massa por meio de uma fotolitografia de etapa única. UV, ultravioleta. (B) Ilustração esquemática das bactérias tomadas como inspiração para este estudo e as imagens ópticas dos micro-nadadores artificiais projetados. (C) Alinhamento fora do plano (δ ≠ 0) de MNPs leva a um ângulo de desalinhamento diferente de zero (ϕ). As imagens ópticas mostrando dois nadadores com formas idênticas e variando ϕ são mostradas. (D) Uma comparação da motilidade de micro-nadadores nadando em fluidos com diferentes viscosidades. (E) Motilidade dos micro-nadadores tubulares flagelados e micro-nadadores helicoidais codificados com duas anisotropias magnéticas diferentes girando em uma solução com uma viscosidade de 3 mPa · s. (F) Efeito do tamanho do corpo na motilidade dos micro nadadores tubulares. Os nadadores foram conduzidos a 2 Hz com uma força de campo de 20 mT em todos os experimentos, a menos que seja afirmado o contrário. Todos os gráficos de barras representam a média ± SEM (n =6 medições para cada micro-nadador e três nadadores diferentes testados por condição). Crédito:Science Advances, doi:10.1126 / sciadv.aau1532
p As bactérias exibem uma plasticidade notável ao explorar a mecânica em resposta às mudanças locais nas condições físicas e químicas. Estruturas compatíveis geralmente auxiliam o comportamento dos táxis para navegar dentro de ambientes complexos e estruturados. Mecanismos microbiológicos bioinspirados contêm arquiteturas racionalmente projetadas capazes de grandes, deformação não linear para introduzir autonomia em dispositivos de pequena escala projetados. p Em um estudo recente, H.W. Huang e colegas dos departamentos de engenharia mecânica, matemática aplicada e física teórica, analisou os efeitos das forças hidrodinâmicas e reologia do entorno local em nadar em número de Reynolds baixo. No trabalho, eles identificaram os desafios e benefícios do uso do acoplamento elasto-hidrodinâmico na locomoção para desenvolver um conjunto de máquinas para construir microrrobôs não amarrados com mobilidade autorregulada. Os cientistas foram capazes de demonstrar o acoplamento entre as propriedades estruturais e magnéticas de micro-nadadores artificiais com as propriedades dinâmicas do fluido, durante a locomoção adaptativa na ausência de sensores a bordo. Os resultados agora são publicados em
Avanços da Ciência .
p Os microrganismos contêm diversos mecanismos de movimento molecular para navegar com eficácia em ambientes complexos e nichos ecológicos. Em bactérias, natação surge das interações mecânicas entre os flagelos atuados, corpo celular e o arrasto gerado pelo fluxo. Forças viscosas em baixo número de Reynolds são responsáveis pelo arrasto hidrodinâmico, que por sua vez depende da forma dos objetos em movimento.
p Para otimizar sua mobilidade, as bactérias podem adotar formas e tamanhos alternativos durante o curso de seus ciclos de vida. Além de mudar a forma do corpo, as bactérias também podem usar sistemas propulsores para movimentos avançados em ambientes complexos. Por exemplo, dobrando um gancho, Caulobacter crescentus pode aumentar a motilidade, enquanto Vibrio alginolyticus pode superar Escherichia coli multi-flagelada na escalada de gradientes de nutrientes devido à instabilidade de flambagem flagelar. Além disso, Shewanella putrefaciens pode escapar de armadilhas físicas por meio de uma transição polimórfica no filamento flagelar.
p Nadadores artificiais microscópicos que os pesquisadores desenvolveram por meio de microengenharia bioinspirada para se mover através dos fluidos corporais, atravessar as barreiras biológicas e acessar locais remotos de doenças pode revolucionar as terapias direcionadas. O trabalho pioneiro no campo já demonstrou a viabilidade de mimetizar o flagelo procariótico ou eucariótico para construir micro-nadadores magneticamente controlados com movimento não recíproco. Contudo, ao contrário das células vivas, esses dispositivos mecânicos não podem sentir seu ambiente local ou se adaptar às mudanças nas condições físicas. O controle de materiais artificiais pode abrir caminho para construir sintonizáveis, soluções de engenharia duráveis e robustas, como dispositivos robóticos biohíbridos autônomos.
p No presente trabalho, Huong et al. apresentar um método simples e versátil baseado na fabricação de materiais para projetar micro-máquinas macias controladas magneticamente. O conceito é baseado em um sistema multicorpo reconfigurável 3-D projetado a partir de uma monocamada de hidrogel nanocompósito. Em trabalhos anteriores realizados pelo mesmo grupo de pesquisa, Huang et al. detalhou a forma e o perfil de magnetização de micro-máquinas auto-dobradas nas quais as estruturas poderiam ser programadas de forma independente pela incorporação de nanopartículas magnéticas (MNPs) em camadas de hidrogel padronizadas.
p Para este estudo, os cientistas apresentaram um conjunto de estratégias de design para autorregular o movimento e a capacidade de manobra por meio da interação entre viscosos, elástico, forças magnéticas e osmóticas. Huang et al. demonstrou que o corpo reconfigurável pode se transformar continuamente de acordo com o fluido circundante, permitindo o movimento através de constrições para melhor desempenho da locomotiva. Eles mostraram que o acoplamento elasto-hidrodinâmico na mudança de forma e nas adaptações de marcha poderia permitir que os microbôs navegassem no interior obstruídos, ambientes heterogêneos e dinâmicos.
 p Papel do plano corporal na capacidade de manobra. Os micro nadadores helicoidais apresentaram o melhor desempenho esperado, pois não lidam com a coordenação do corpo e cauda. Crédito:Science Advances, doi:10.1126 / sciadv.aau1532.
p Papel do plano corporal na capacidade de manobra. Os micro nadadores helicoidais apresentaram o melhor desempenho esperado, pois não lidam com a coordenação do corpo e cauda. Crédito:Science Advances, doi:10.1126 / sciadv.aau1532.
p Huang et al. projetou os micro nadadores suaves usando locomoção bioinspirada com uma variante de origami conhecida como kirigami. As microestruturas compatíveis com 3-D foram projetadas a partir de um gel termorresponsivo reforçado com MNPs (nanopartículas magnéticas). Durante o processo de fabricação, os cientistas iniciaram o corte por fotolitografia e a dobra após hidratação da camada polimerizada. A distribuição não uniforme de MNPs ao longo da direção da espessura permitiu a formação de duas camadas distintas de hidrogéis com razões de intumescimento significativamente diferentes.
p Os pesquisadores se concentraram em três configurações de microrganismos, incluindo C. crescentus, Helicobacter pylori e Borrelia burgdorferi. As bactérias normalmente nadam girando filamentos flagelares semelhantes a hélices que se estendem do corpo celular. A biomimética do movimento pode permitir que micro-nadadores artificiais se movam, se o momento magnético da máquina era perpendicular ao seu longo eixo. Contudo, as estruturas se assemelhavam a agulhas de bússola, alinhando seu eixo longo com a direção do campo magnético externo. Para superar essa limitação, Huang et al variaram o alinhamento fora do plano dos MNPs inatos no material, enquanto mantém o alinhamento de partículas no plano constante.
 p Registro dinâmico do perfil de magnetização. Os nanocompósitos reforçados magneticamente estavam em uma direção diferente da direção do alinhamento MNP. O campo aplicado foi significativamente maior do que o campo magnético aplicado para alinhar as partículas durante a fabricação dos microbotões. Crédito:Science Advances, doi:10.1126 / sciadv.aau1532.
p Registro dinâmico do perfil de magnetização. Os nanocompósitos reforçados magneticamente estavam em uma direção diferente da direção do alinhamento MNP. O campo aplicado foi significativamente maior do que o campo magnético aplicado para alinhar as partículas durante a fabricação dos microbotões. Crédito:Science Advances, doi:10.1126 / sciadv.aau1532.
p Para otimizar o movimento em diferentes viscosidades, as microestruturas adquiriram diferentes andamentos. Para explorar sistematicamente a vantagem potencial da diversidade morfológica Huong et al. construiu micro-nadadores com diferentes planos corporais e os acionou em fluidos com viscosidade variável. Os cientistas foram capazes de projetar micro nadadores que seguiram trajetórias helicoidais 3-D, coordenando sua morfologia com seu perfil de magnetização. Em todos os experimentos, o número Reynolds variou de 10
-2
a 10
-4
; para indicar natação sob fluxo laminar.
p Em uma solução de sacarose com a mesma viscosidade do sangue, os micro-nadadores flagelados com cauda plana flexível e corpo tubular moviam-se mais rápido por movimento helicoidal em comparação com outros protótipos. Micro-nadadores flagelados se beneficiaram tanto do movimento helicoidal quanto do saca-rolhas, enquanto micro-nadadores helicoidais realizavam movimentos em saca-rolhas. Contudo, durante o aumento da viscosidade, o movimento de todos os micro-nadadores diminuiu, mas a queda foi maior para micro-nadadores flagelados com cauda plana. Em maior viscosidade, Huong et al observaram que micro-nadadores helicoidais eram os mais rápidos, já que o único movimento relevante nas condições era o movimento do saca-rolhas.
p Ao lado do movimento, a capacidade de regular o movimento (capacidade de manobra) desempenha um papel fundamental nas bactérias para sentir e detectar gradientes de nutrientes. Os cientistas testaram a capacidade de manobra de micro-nadadores artificiais induzindo deflexões no ângulo de guinada (rotação) durante a natação. Um micro-nadador altamente manobrável pode mudar sua direção de movimento rapidamente com uma pequena mudança no sinal de controle. Durante perturbações mais fortes (rotação de guinada de 45 graus), a geometria do corpo e da cauda desempenhou um papel importante na resposta de micro-nadadores complacentes. Estruturalmente, o corpo respondeu ao sinal de controle antes da cauda, já que a magnetização do corpo era maior. Nadadores com cauda plana mostraram maior suscetibilidade a instabilidades, uma cauda helicoidal poderia contribuir comparativamente para a estabilização devido à maior rigidez da geometria helicoidal.
p
 p Adaptação da forma em canais curvos sob fluxo axial com taxa de 2 ml / min. A deformação observada foi elástica, e os nadadores recuperaram completamente sua forma após passar pelo canto sob o fluxo aplicado externamente com uma taxa de 2 ml / min. O aumento da rigidez dos filamentos reduziu a deformação e levou à obstrução do canal. Crédito:Science Advances, doi:10.1126 / sciadv.aau1532.
p Adaptação da forma em canais curvos sob fluxo axial com taxa de 2 ml / min. A deformação observada foi elástica, e os nadadores recuperaram completamente sua forma após passar pelo canto sob o fluxo aplicado externamente com uma taxa de 2 ml / min. O aumento da rigidez dos filamentos reduziu a deformação e levou à obstrução do canal. Crédito:Science Advances, doi:10.1126 / sciadv.aau1532.
Os cientistas prepararam máquinas tubulares para explorar o efeito combinado do tamanho do corpo e da viscosidade na capacidade de manobra. Eles foram capazes de re-magnetizar dinamicamente o corpo para fornecer um método para ajustar a motilidade e a capacidade de manobra sob demanda. Eles descobriram que um tamanho de corpo menor fornecia vantagem comparativa, reduzindo o arrasto rotacional e aumentando o torque magnético, independentemente da viscosidade.
p Huong e colegas de trabalho determinaram a eficiência de propulsão de nadadores complacentes por acoplamento entre as forças magnéticas, flexibilidade dos filamentos e arrasto viscoso. Eles investigaram as propriedades elasto-hidrodinâmicas para desencadear uma transição de marcha em resposta à alteração da viscosidade. Os cientistas observaram o enrolamento da cauda do microbô em maior viscosidade e frequência. A transição ou transformação morfológica observada, contribuiu para o movimento do saca-rolhas para melhorar a motilidade do microbot.
 p Adaptação da marcha de micro nadadores tubulares com cauda elástica. As propriedades elasto-hidrodinâmicas podem ser exploradas para desencadear uma transição da marcha em resposta a mudanças na viscosidade baixa e alta. Crédito:Science Advances, doi:10.1126 / sciadv.aau1532.
p Adaptação da marcha de micro nadadores tubulares com cauda elástica. As propriedades elasto-hidrodinâmicas podem ser exploradas para desencadear uma transição da marcha em resposta a mudanças na viscosidade baixa e alta. Crédito:Science Advances, doi:10.1126 / sciadv.aau1532.
p Com base em estratégias abrangentes de movimento e manobrabilidade, os dados obtidos no estudo revelaram que um corpo tubular com cauda plana era preferível a nadar em baixa viscosidade. Comparativamente, uma morfologia helicoidal pode ter um desempenho melhor em viscosidade mais alta. Huong et al. construiu um micro-ondas magneticamente reconfigurável para sofrer transformação de forma entre as duas configurações com base nas condições externas. Os micro-nadadores programados podem mudar de forma para velocidade de avanço sustentada e manobrabilidade aprimorada, apesar do aumento das forças viscosas.
p Desta maneira, análises cuidadosas do desempenho de natação em viscosidades variáveis forneceram uma diretriz para construir uma única micro-máquina. Para resolver o problema de navegação em micro / nanoescala, Huong et al. reduziu o número de elementos a serem controlados para as vantagens resultantes de velocidade, versatilidade e custo. Os microbôs podem ser fabricados por meio de métodos escalonáveis e de alto rendimento para abrir portas para o desenvolvimento de uma variedade de microrrobôs macios para aplicações médicas e industriais. p © 2019 Science X Network