Uma nova abordagem de aprendizagem supervisionada para compreender o planejamento em robôs
 p Garras de precisão (esquerda) e potência (direita) geradas pelo planejador de garras. Crédito:Lu &Hermans.
p Garras de precisão (esquerda) e potência (direita) geradas pelo planejador de garras. Crédito:Lu &Hermans.
p Pesquisadores da Universidade de Utah desenvolveram recentemente um planejador de agarramento probabilístico que pode modelar explicitamente tipos de agarramento para planejar precisão de alta qualidade e agarramentos de potência em tempo real. Sua abordagem de aprendizagem supervisionada, descrito em um artigo pré-publicado no arXiv, pode planejar com eficácia as pegadas de força e precisão para um determinado objeto. p Para humanos e robôs, diferentes tarefas de manipulação requerem diferentes tipos de preensão. Por exemplo, segurando uma ferramenta pesada, como um martelo, requer uma pega de força com vários dedos que oferece estabilidade, enquanto segurar uma caneta requer um aperto de precisão com vários dedos, pois isso pode transmitir destreza ao objeto.
p Ao testar sua abordagem anterior para entender o planejamento, a equipe de pesquisadores da Universidade de Utah notou que quase sempre gerava agarrões de força em que a mão do robô se enrolava em um objeto, com grandes regiões de contato entre sua mão e o objeto. Essas garras são úteis para completar uma variedade de tarefas robóticas, como pegar objetos em outro lugar da sala, ainda assim, eles são inúteis ao executar tarefas de manipulação manual.
p "Pense em mover um pincel ou bisturi que você está segurando com a ponta dos dedos, "Tucker Hermans, um dos pesquisadores que realizou o estudo, disse TechXplore. "Esses tipos de tarefas exigem pegadas de precisão, onde o robô segura o objeto com as pontas dos dedos. Olhando para a literatura, vimos que os métodos existentes tendem a gerar apenas um tipo de compreensão, precisão ou poder. Portanto, propusemo-nos a criar uma abordagem de síntese de compreensão que possa lidar com ambos. Por aqui, nosso robô pode usar garras de poder para escolher e posicionar de maneira estável os objetos que deseja mover, mas a precisão agarra quando precisa executar tarefas de manipulação manual. "
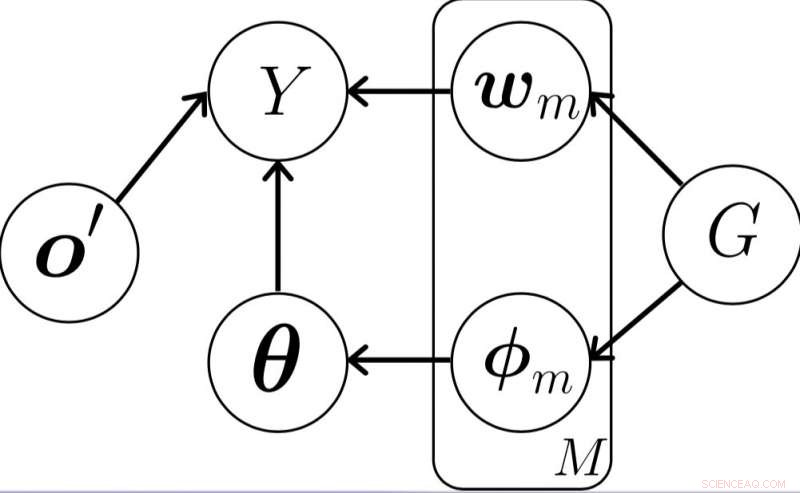 p O modelo gráfico probabilístico do tipo agarrar proposto. Crédito:Lu &Hermans.
p O modelo gráfico probabilístico do tipo agarrar proposto. Crédito:Lu &Hermans.
p Na abordagem para compreender o planejamento desenvolvido por Hermans e seu colega Qingkai Lu, um robô aprende a prever o sucesso de agarrar com base em experiências anteriores. O robô tenta diferentes tipos de pegadas em diferentes objetos, registrando quais delas foram bem-sucedidas e quais falharam. Esses dados são então usados para treinar um classificador para prever se uma determinada compreensão será bem-sucedida ou não.
p "O classificador toma como entrada uma imagem de profundidade do objeto e a configuração de preensão selecionada (ou seja, onde colocar a mão e como moldar os dedos), "Hermans explicou." Além de prever o sucesso, o classificador relata o quão confiante está de que a pegada terá sucesso em uma escala de zero a um. Quando apresentado a um objeto para agarrar, o robô planeja uma pegada pesquisando diferentes agarras possíveis e selecionando aquela que o classificador prevê a maior confiança no sucesso. "
p A abordagem de aprendizagem supervisionada desenvolvida por Hermans e Lu pode planejar diferentes tipos de preensão para objetos previamente invisíveis, mesmo quando apenas informações visuais parciais estão disponíveis. Deles poderia ser o primeiro método de planejamento de compreensão para planejar explicitamente os agarramentos de potência e precisão.
-
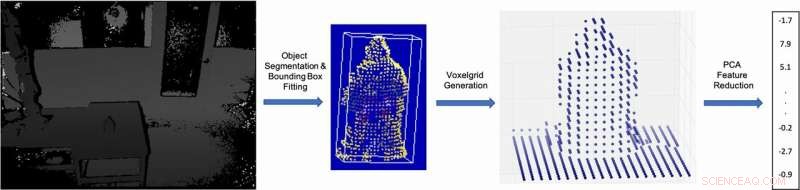 p Ilustração do processo de extração de recursos visuais. Crédito:Lu &Hermans.
p Ilustração do processo de extração de recursos visuais. Crédito:Lu &Hermans.
-
 p Exemplo de imagem RGB gerada pela câmera Kinect2 mostrando o robô e o objeto parecido com Lego na mesa. Crédito:Lu &Hermans.
p Exemplo de imagem RGB gerada pela câmera Kinect2 mostrando o robô e o objeto parecido com Lego na mesa. Crédito:Lu &Hermans.
p Os pesquisadores avaliaram seu modelo e o compararam com um modelo que não codifica o tipo de aperto. Suas descobertas sugerem que o tipo de aperto de modelagem pode melhorar a taxa de sucesso dos agarramentos gerados, com seu modelo superando o outro método.
p "Acreditamos que nossos resultados são importantes de duas maneiras significativas, "Hermans disse." Primeiro, nossa abordagem proposta permite que um robô selecione explicitamente o tipo de aperto que deseja, resolver o problema que pretendemos abordar. Segundo, e potencialmente mais importante, adicionar esse conhecimento do tipo agarrar ao sistema melhora a capacidade do robô de agarrar objetos com sucesso. Assim, mesmo se você quiser apenas um tipo de pega, diga power grasps, ainda ajuda saber que existem preensões de precisão quando se aprende a agarrar. "
p A abordagem idealizada por Hermans e Lu pode auxiliar no desenvolvimento de robôs capazes de gerar um conjunto diversificado de agarres. Em última análise, isso permitiria que esses robôs concluíssem uma ampla variedade de tarefas, que envolvem diferentes tipos de manipulação de objetos.
-
 p Exemplos de precisão bem-sucedida e agarres de potência gerados pela nova abordagem de modelagem do tipo agarrar para o planejamento de agarrar. As duas primeiras linhas são de preensão de precisão. As duas últimas linhas são garras de força. Crédito:Lu &Hermans.
p Exemplos de precisão bem-sucedida e agarres de potência gerados pela nova abordagem de modelagem do tipo agarrar para o planejamento de agarrar. As duas primeiras linhas são de preensão de precisão. As duas últimas linhas são garras de força. Crédito:Lu &Hermans.
-
 p Apertos de precisão (à esquerda) e potentes (à direita) gerados pelo novo planejador de aperto. Crédito:Lu &Hermans.
p Apertos de precisão (à esquerda) e potentes (à direita) gerados pelo novo planejador de aperto. Crédito:Lu &Hermans.
p "Agora estamos olhando para duas extensões diretas desse trabalho, "Hermans disse." Primeiro, desejamos examinar os efeitos da modelagem de mais tipos de preensão, por exemplo, distinguir entre subtipos de preensões de precisão caracterizados por diferentes segmentos do dedo em contato com o objeto. Para conseguir isso, estamos planejando aumentar a mão do robô com pele para permitir a detecção automática de onde os contatos são feitos. Segundo, desejamos incorporar mais informações para auxiliar na seleção automática do tipo apropriado de preensão para uma tarefa solicitada. Por exemplo, como pode o robô decidir automaticamente que deve usar uma pega de precisão para criar uma pintura, sem que a operadora diga isso? " p © 2019 Science X Network