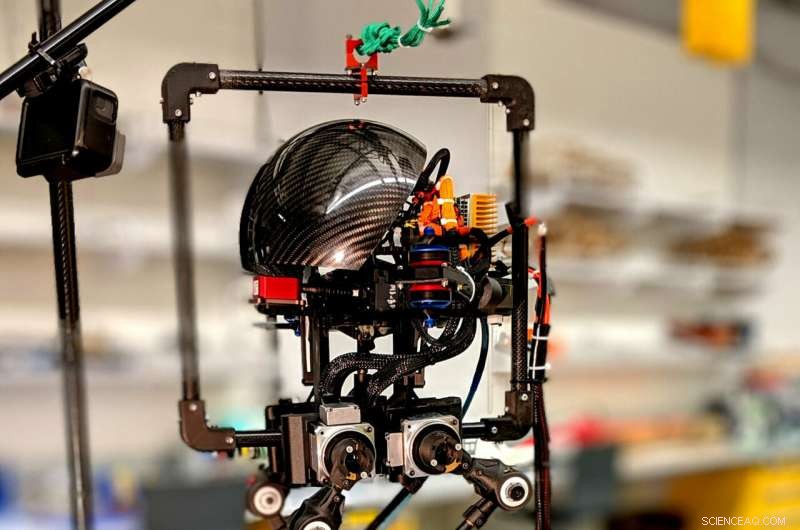
Leo tem cerca de dois pés e meio de altura, no fino, pernas flexionadas. Crédito:Alireza Ramezani, Soon-Jo Chung, e Morteza Gharib
Um robô bípede caminha na superfície de um planeta distante. Seus sensores examinam o ambiente, enviando dados de volta para a Terra. Chega a uma encosta em ruínas, flexiona os joelhos e salta, propulsores zumbindo, para pousar com segurança acima da rocha solta.
Este futuro ainda é um sonho distante, mas Alireza Ramezani, professor assistente de engenharia elétrica e da computação na Northeastern, deu um passo mais perto com seu novo robô.
O robô é conhecido como LEONARDO, um acrônimo para LEg ON Aerial Robotic DrOne, ou Leo para breve. Ele tem uma capacidade que a maioria dos robôs atualmente simplesmente não tem:pode andar e voar.
"Inicialmente, foi desenvolvido com a ideia de projetar exploradores - sistemas que podem combinar mobilidade por pernas e mobilidade aérea rápida para fazer explorações autônomas, "Ramezani disse.
Leo tem cerca de dois pés e meio de altura, no fino, pernas flexionadas. Com um corpo feito principalmente de fibra de carbono, o robô é forte, mas pesa apenas seis libras. Ele tem propulsores em cada lado do que Ramezani chama de torso. Eles são capazes de fornecer impulso em qualquer direção, e são poderosos o suficiente para voar. Mas essa não é sua função principal.
“A ideia não é criar um quadricóptero, "Ramezani disse." A ideia é ter uma máquina que possa alavancar suas pernas e os propulsores para, por exemplo, aumentar sua capacidade de salto. "
Os propulsores também podem ajudar a estabilizar o robô em superfícies irregulares, ou pegue-o se começar a cair.
"Este é o maior desafio para sistemas de pernas, ou mesmo humanos:podemos estabilizar nosso corpo, mas às vezes caímos, "Ramezani disse." E se pudéssemos ter um robô que nunca cai? "
Ramezani começou a estudar sistemas robóticos de pernas durante seu trabalho de graduação na Universidade de Michigan. Robôs ambulantes geralmente lutam em terrenos acidentados. No momento, ele se perguntou se havia uma maneira de implantar um airbag para amortecer a queda de um robô. Agora ele projetou um robô que pode se segurar.
A ideia veio da observação de pássaros, Ramezani disse. A maioria dos projetos robóticos se concentra exclusivamente em um tipo de locomoção, mas os pássaros são capazes de andar, voe, e até mesmo correr.
"Você pode ver a engenharia com perfeição na natureza, e podemos aprender muito, "disse Ramezani, que também construiu um robô voador baseado nas acrobacias aéreas dos morcegos. "Isso tem sido uma inspiração para mim em quase todos os meus projetos."
Quando Ramezani ingressou na Northeastern no outono passado, Leo ficou para trás no Instituto de Tecnologia da Califórnia, onde Ramezani tinha sido um pesquisador de pós-doutorado. Ele planeja construir uma versão atualizada do robô em Boston, para alunos do Nordeste usarem como plataforma de aprendizagem.
"Nesta fase, Eu vejo isso como uma plataforma muito boa para impulsionar a robótica ágil. Pense em um robô que literalmente nunca cai:ele pode contornar terrenos acidentados, pode voar, Pode pular. Um sistema ultra-capaz, "Ramezani disse." Na estrada, podemos usar uma máquina como esta para exploração. "