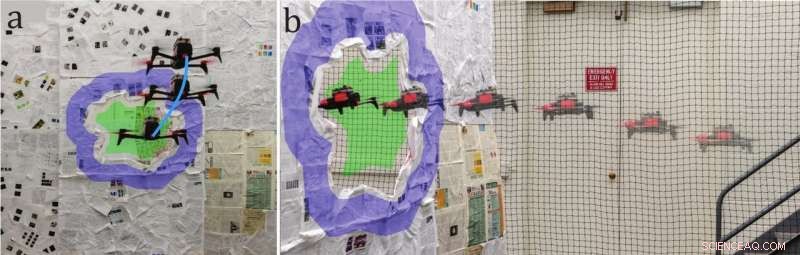
Diferentes partes do pipeline:(a) Detecção da lacuna desconhecida usando visão ativa e algoritmo TS2P (destaque em ciano mostra o caminho seguido para obter várias imagens para detecção), (b) Seqüência de quadrotor passando pela lacuna desconhecida usando controle baseado em servo visual. Os realces em azul e verde representam as regiões rastreadas de primeiro e segundo plano, respectivamente. Crédito:arXiv:1802.05330 [cs.RO]
Os pesquisadores criaram um sistema que é bioinspirado para ajudar os drones a passar por pequenas lacunas. Os pesquisadores testaram seu sistema e escreveram uma análise em um artigo publicado em IEEE Robotics &Automation Letters .
"GapFlyt:Active Vision Based Minimalist Structure-less Gap Detection For Quadrotor Flight" é de Nitin J. Sanket, Chahat Deep Singh, Kanishka Ganguly, Cornelia Fermüller e Yiannis Aloimonos. Os autores são do grupo de Percepção e Robótica da Universidade de Maryland em College Park.
Eles trabalharam em um design bioinspirado para quadrotores. Esta é uma estrutura destinada a quadrotores para voar através de "lacunas desconhecidas sem uma reconstrução 3D da cena, "eles afirmaram, "usando apenas uma câmera monocular e sensor integrado."
Sua tentativa de notar que tudo isso sem uma reconstrução 3D merece um olhar mais atento. Em outro lugar, eles explicaram que "Pesquisadores e profissionais de hoje usam algoritmos de visão computacional tradicionais com o objetivo de construir uma representação de aplicabilidade geral:uma reconstrução 3D da cena. Usando essa representação, as tarefas de planejamento são construídas e realizadas para permitir que o quadrotor demonstre um comportamento autônomo. Esses métodos são ineficientes, pois não são orientados por tarefas. "
Basta olhar para insetos voadores e pássaros - resolvendo o problema de navegação e controle complexo por anos por conta própria, sem a necessidade de construir um mapa 3D, eles disseram, e são altamente orientados para tarefas.
Evan Ackerman em Espectro IEEE muito bem oferecido uma lição sobre abelhas.
"As abelhas fazem esse trabalho por meio de uma abordagem de força bruta minimalista para o problema:elas voam até um pequeno buraco ou lacuna, flutuar, vagueie para frente e para trás um pouco para coletar informações visuais sobre onde as bordas da lacuna, e, em seguida, orientar-se. Nao e rapido, e não é particularmente elegante, mas é confiável e não leva muito para ser executado. "
O título do artigo reflete a própria questão que eles colocaram como uma equipe:"Um quadrotor consegue passar por uma lacuna de forma arbitrária sem construir um modelo 3D explícito de uma cena, usando apenas uma câmera monocular? "
Eles o testaram em experimentos com diferentes configurações e formatos de janela. A estrutura proposta foi testada em um quadrotor hobby modificado, Parrot Bebop 2.
Espectro IEEE carregavam uma legenda da foto que descrevia o que eles usavam para os experimentos. O drone modificado, disse a legenda, incluiu um módulo NVIDIA TX2 montado na parte superior. Para sentir, o drone usou sua câmera frontal e um sensor de fluxo óptico voltado para baixo, que combina uma câmera e um sonar.
Resultados? Eles disseram que alcançaram "uma taxa de sucesso de 85% a 2,5 m / s, mesmo com uma tolerância mínima de apenas 5cm. "
Espectro IEEE notaram que obtiveram essa taxa de sucesso de mais de 150 tentativas "para diferentes janelas de formato arbitrário sob uma ampla gama de condições, que inclui uma janela com uma tolerância mínima de apenas 5 cm."
Quanto à velocidade máxima que o drone foi capaz de atingir ao passar pelo vão, 2,5 m / s, Ackerman disse que era "principalmente limitado pela câmera do obturador de rolamento (que poderia atrapalhar o fluxo óptico em velocidades mais altas), mas novamente, este método não se destina a drones de alto desempenho. "
Por que seu trabalho é importante:este artigo aborda o problema da detecção de lacunas de uma forma e local desconhecidos com uma câmera monocular e sensoriamento a bordo. Isso não quer dizer, a questão de ultrapassar as lacunas é nova. Os autores apontaram que "o problema de atravessar lacunas fascina pesquisadores há muitos anos". Pesquisadores em outros lugares apresentaram algoritmos para planejamento e controle e os autores disseram que alguns trabalhos abriram caminho para a abordagem bioinspirada que usaram no artigo.
© 2018 Tech Xplore