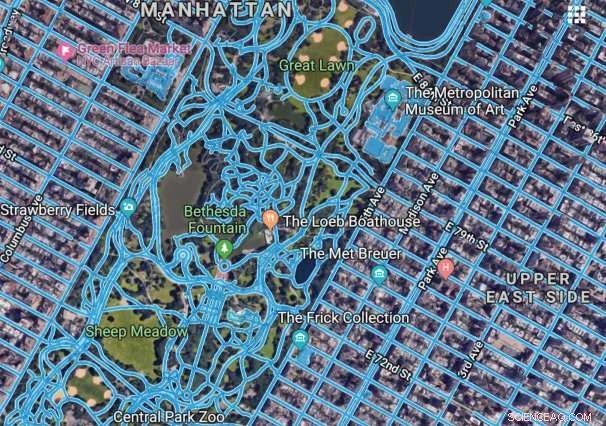
Para criar roteiros completos, empresas como o Google geralmente precisam de funcionários para obter imagens aéreas existentes com informações incompletas e preencher as lacunas manualmente. Crédito:Massachusetts Institute of Technology
Os aplicativos de mapas podem ter mudado nosso mundo, mas eles ainda não mapearam tudo ainda. Especificamente, mapear estradas pode ser difícil e tedioso:mesmo depois de tirar fotos aéreas, as empresas ainda precisam gastar muitas horas traçando manualmente as estradas. Como resultado, até mesmo empresas como o Google ainda não mapearam a grande maioria dos mais de 20 milhões de quilômetros de estradas em todo o mundo.
Lacunas nos mapas são um problema, particularmente para sistemas que estão sendo desenvolvidos para carros autônomos. Para resolver o problema, pesquisadores do Laboratório de Ciência da Computação e Inteligência Artificial do MIT (CSAIL) criaram o RoadTracer, um método automatizado para construir roteiros que é 45% mais preciso do que as abordagens existentes.
Usando dados de imagens aéreas, a equipe diz que o RoadTracer não é apenas mais preciso, mas mais econômica do que as abordagens atuais. O professor do MIT, Mohammad Alizadeh, diz que este trabalho será útil tanto para gigantes da tecnologia como o Google quanto para organizações menores, sem recursos para curar e corrigir grandes quantidades de erros em mapas.
"O RoadTracer é adequado para mapear áreas do mundo onde os mapas estão frequentemente desatualizados, que inclui locais com menor população e áreas onde há construção frequente, "diz Alizadeh, um dos co-autores de um novo artigo sobre o sistema. "Por exemplo, Os mapas existentes para áreas remotas como a Tailândia rural estão sem muitas estradas. O RoadTracer pode ajudar a torná-los mais precisos. "
Por exemplo, olhando imagens aéreas da cidade de Nova York, O RoadTracer pode mapear corretamente 44 por cento de seus entroncamentos rodoviários, que é mais do que duas vezes mais eficaz do que as abordagens tradicionais com base na segmentação de imagem que poderia mapear apenas 19 por cento.
O papel, que será apresentado em junho na Conferência sobre Visão Computacional e Reconhecimento de Padrões (CVPR) em Salt Lake City, Utah, é uma colaboração entre o CSAIL e o Qatar Computing Research Institute (QCRI).
Os co-autores do MIT de Alizadeh incluem os alunos de pós-graduação Fayven Bastani e Songtao He, e os professores Hari Balakrishnan, Sam Madden, e David DeWitt. Os co-autores do QCRI incluem o engenheiro de software sênior Sofiane Abbar e Sanjay Chawla, quem é o diretor de pesquisa do Grupo de Análise de Dados da QCRI.
Os esforços atuais para automatizar mapas envolvem o treinamento de redes neurais para observar imagens aéreas e identificar pixels individuais como "estrada" ou "não estrada". Como as imagens aéreas costumam ser ambíguas e incompletas, esses sistemas também requerem uma etapa de pós-processamento que visa tentar preencher algumas das lacunas.
Infelizmente, essas chamadas abordagens de "segmentação" são muitas vezes imprecisas:Se o modelo rotula incorretamente um pixel, esse erro será ampliado no roteiro final. Os erros são particularmente prováveis se as imagens aéreas tiverem árvores, edifícios, ou sombras que obscurecem onde as estradas começam e terminam. (A etapa de pós-processamento também requer a tomada de decisões com base em suposições que nem sempre se sustentam, como conectar dois segmentos de estrada simplesmente porque estão próximos um do outro.)
Enquanto isso, RoadTracer cria mapas passo a passo. Começa em um local conhecido na rede rodoviária, e usa uma rede neural para examinar a área circundante para determinar qual ponto tem mais probabilidade de ser a próxima parte da estrada. Em seguida, adiciona esse ponto e repete o processo para rastrear gradualmente a rede rodoviária, um passo de cada vez.
"Em vez de tomar milhares de decisões diferentes ao mesmo tempo sobre se vários pixels representam partes de uma estrada, O RoadTracer se concentra no problema mais simples de descobrir qual direção seguir ao começar de um ponto específico que sabemos ser uma estrada, "diz Bastani." De muitas maneiras, isso está muito mais próximo de como nós, como humanos, construímos modelos mentais do mundo ao nosso redor. "
A equipe treinou o RoadTracer em imagens aéreas de 25 cidades em seis países da América do Norte e Europa, e então avaliou suas habilidades de mapeamento em 15 outras cidades.
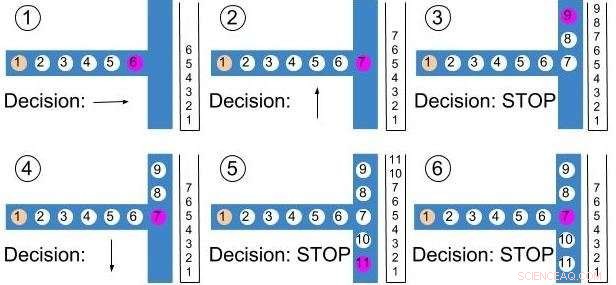
Para criar um roteiro, o sistema começa em um local conhecido e usa uma rede neural para examinar a área circundante e determinar qual ponto tem mais probabilidade de ser a próxima parte da estrada. Em seguida, adiciona esse ponto e repete o processo para traçar gradualmente a estrada, um passo de cada vez. Crédito:Massachusetts Institute of Technology
"É importante que um sistema de mapeamento seja capaz de funcionar bem em cidades nas quais não foi treinado, porque as regiões onde o mapeamento automático é mais promissor são aquelas onde os mapas existentes são inexistentes ou imprecisos, "diz Balakrishnan.
Bastani diz que o fato de o RoadTracer ter uma taxa de erro 45% menor é essencial para tornar os sistemas de mapeamento automático mais práticos para empresas como o Google.
"Se a taxa de erro for muito alta, então é mais eficiente mapear as estradas manualmente do zero do que remover segmentos incorretos do mapa inferido, "diz Bastani.
Ainda, implementar algo como o RoadTracer não tiraria as pessoas completamente do circuito:a equipe diz que eles poderiam imaginar o sistema propondo roteiros para uma grande região e, em seguida, tendo um especialista humano para verificar o projeto.
"Dito isto, o que está claro é que, com um sistema como o nosso, você poderia diminuir drasticamente a quantidade de trabalho tedioso que os humanos teriam que fazer, "Alizadeh diz.
De fato, uma vantagem da abordagem incremental do RoadTracer é que ele torna muito mais fácil corrigir os erros; supervisores humanos podem simplesmente corrigi-los e executar novamente o algoritmo de onde pararam, em vez de continuar a usar informações imprecisas que chegam a outras partes do mapa.
Claro, as imagens aéreas são apenas uma peça do quebra-cabeça. Eles não fornecem informações sobre estradas que têm viadutos e passagens subterrâneas, uma vez que esses são impossíveis de determinar de cima. Como resultado, a equipe também está desenvolvendo separadamente algoritmos que podem criar mapas a partir de dados de GPS, e trabalhar para fundir essas abordagens em um único sistema de mapeamento.
Esta história foi republicada por cortesia do MIT News (web.mit.edu/newsoffice/), um site popular que cobre notícias sobre pesquisas do MIT, inovação e ensino.