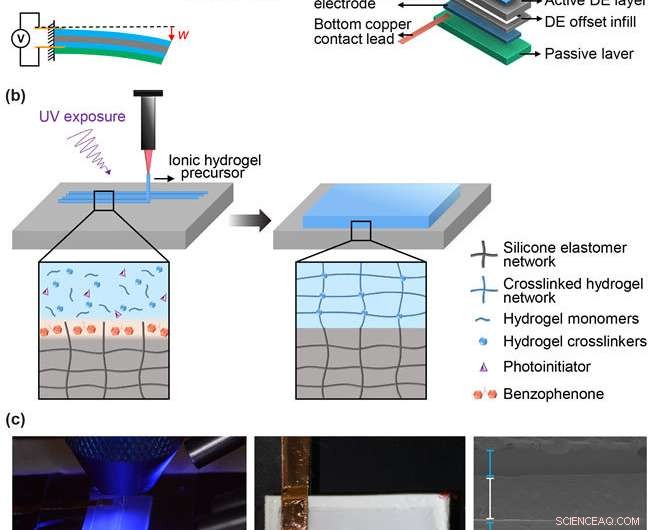
(a) Esquema de um dispositivo atuador macio (esquerda) e vista explodida do dispositivo e das camadas de material constituinte (direita). (b) Esquema de deposição (impressão 3D) de hidrogel na superfície de uma camada de silicone após o tratamento de superfície e sob exposição à luz ultravioleta. (c) Impressão do hidrogel iônico na camada passiva após o tratamento de superfície (esquerda), DEA impresso 3-D final (meio), e imagem da microestrutura da seção transversal do dispositivo (direita). Crédito:Exército dos EUA
Para superar a rigidez do material e as limitações de atuação nos sistemas robóticos atuais, um projeto de pesquisa conjunto do Laboratório de Pesquisa do Exército dos EUA e da Universidade de Minnesota buscou inspiração em invertebrados.
O Exército dos EUA usa robôs que são estruturalmente rígidos, tornando-os impraticáveis ao realizar operações militares em ambientes urbanos altamente congestionados e contestados, onde a manobra encoberta é crítica para obter superioridade militar.
"Manobras furtivas bem-sucedidas requerem alta flexibilidade estrutural e controle distributivo para se infiltrar em espaços confinados ou restritos, operar por longos períodos e emular morfologias biológicas e adaptabilidade, "disse o Dr. Ed Habtour, Pesquisador da ARL especializado em dinâmica estrutural não linear.
De acordo com Habtour, Os robôs militares atuais têm duas limitações principais que os impedem de imitar a locomoção de organismos biológicos.
Primeiro, esses robôs não têm a flexibilidade dinâmica necessária, uma vez que eles são montados principalmente com componentes mecânicos e eletrônicos rígidos.
Segundo, robôs rígidos requerem mecanismos complexos e circuitos elétricos para atingir a atuação ativa e modos complexos de movimento.
Para superar essas limitações, um projeto de pesquisa conjunto ARL e UMN buscou inspiração em invertebrados.
Este esforço de pesquisa levou à criação de protótipos de atuadores flexíveis usando materiais ativos com parâmetros notavelmente ajustáveis, como flexibilidade estrutural, morfologia e atuação dinâmica.
O protótipo é o primeiro atuador de elastômero dielétrico totalmente 3D impresso, ou DEA, que pode realizar movimentos de alta flexão.
Os DEAs impressos em 3D exibiram deflexões significativamente maiores, três vezes mais do que outros exemplos recentes na literatura científica.
Esses resultados foram publicados em Letras de Mecânica Extrema (EML) em um artigo intitulado:"Atuadores macios acionados eletricamente impressos em 3-D", 2018.
“Na fase inicial do projeto, nossa equipe começou investigando novos métodos para emular a locomoção de invertebrados, que forneceu insights fundamentais sobre as maquinarias de seus circuitos de atuação distribuída macia que permitem movimentos de alta flexão sem suporte esquelético, "disse o professor Michael McAlpine da UMN.

Dr. Ed Habtour trabalha na Diretoria de Tecnologia de Veículos do Laboratório de Pesquisa do Exército dos EUA, onde ele se especializou em sistemas dinâmicos não lineares. Crédito:Foto do Exército dos EUA por Conrad Johnson
Compreender os mecanismos inatos da atuação distributiva observada na natureza ajudou a equipe a identificar os parâmetros importantes que podem ser manipulados para realizar novas funções, como alcançar modos de movimento altamente flexíveis.
De acordo com McAlpine, para obter insights científicos sobre a importância desses parâmetros, foi necessário primeiro construir e testar um protótipo semelhante aos atuadores encontrados na natureza por meio de uma plataforma de impressão 3-D customizada, e então desenvolver um modelo matemático unificado para estudar a sensibilidade de cada parâmetro e prever os vários mecanismos de atuação ideais.
Circuitos de atuação distribuída impressa UMN 3-D envolvendo soft, materiais elásticos com propriedades mecânicas semelhantes a organismos biológicos, como cefalópodes e vermes.
ARL criou um modelo generalizado usando uma abordagem de formulação energética, que foi a chave na identificação de dois mecanismos importantes para permitir alto movimento de flexão em atuadores biológicos suaves:(i) propriedades físicas de ajuste (mecânicas e geométricas) por meio da exploração da interação entre os materiais e as não linearidades dinâmicas para aumentar o movimento; e (ii) destacar o acoplamento eletromecânico entre o campo elétrico e a rigidez estrutural não linear através dos circuitos de atuação distributiva.
"Os resultados da pesquisa representam um passo importante para fornecer ao Solider uma plataforma de fabricação de forma livre autônoma - impressora 3-D de próxima geração, que pode imprimir materiais e dispositivos funcionais - para gerar atuadores soft e robôs soft potencialmente sem amarras sob demanda, na hora e no ponto de necessidade, "Habtour disse.
Habtour observou que a pesquisa também sugere que os atuadores flexíveis podem ser os principais candidatos para a manufatura aditiva autônoma no campo de batalha.
"Ao contrário dos atuais DEAs impressos em 3D, o novo método de fabricação não requer etapas de pós-processamento, como montagem, secagem ou recozimento, "disse o autor principal Ghazaleh Haghiashtiani." Com o novo método de impressão 3-D, o Solider pode aproveitar as propriedades exclusivas de atuação de DEAs suaves no nível de materiais fundamentais com resolução e complexidade em microescala, com experiência prévia mínima. "
Quanto aos próximos passos, Habtour disse que a intenção é desenvolver os princípios experimentais e teóricos que governam a interação entre as interfaces internas e a cinética das interações em sistemas variantes no tempo observados em organismos biológicos, que garantem sua locomoção flexível e resiliência.
"As intrigantes interações entre as propriedades micromecânicas dos materiais e várias não linearidades podem fornecer novas oportunidades científicas para emular as interações simbióticas em sistemas biológicos, "Disse Habtour." Se pudermos entender essas interações, então podemos usar esses insights para fabricar estruturas dinâmicas e robôs flexíveis que são projetados para serem autoconscientes, autodetectável e capaz de ajustar suas morfologias e propriedades em tempo real para se adaptar a uma miríade de condições externas e internas. "
Com isso, Habtour afirmou que as implicações serão descobrir dinâmicas emergentes de estruturas vivas e emulá-las, fabricar estruturas e dispositivos funcionalmente complexos de forma autônoma, e explorar novos modos de atuação não alcançáveis em sistemas convencionais robóticos e mecânicos.