p Nesta imagem, os engenheiros testam as câmeras no topo do mastro do rover Mars 2020 e no chassi frontal. A imagem foi tirada em 23 de julho, 2019, em High Bay 1 da Spacecraft Assembly Facility no Jet Propulsion Laboratory da NASA em Pasadena, Califórnia. Crédito:NASA / JPL-Caltech
p Nesta imagem, os engenheiros testam as câmeras no topo do mastro do rover Mars 2020 e no chassi frontal. A imagem foi tirada em 23 de julho, 2019, em High Bay 1 da Spacecraft Assembly Facility no Jet Propulsion Laboratory da NASA em Pasadena, Califórnia. Crédito:NASA / JPL-Caltech
p Equipado com instrumentos científicos visionários, o rover Mars 2020 passou por um exame "ocular" depois que várias câmeras foram instaladas nele. O rover contém uma armada de recursos de imagem, de câmeras panorâmicas de grande angular a câmeras com lentes de zoom de alta resolução e ângulo estreito. p "Concluímos a calibração da visão de máquina das câmeras voltadas para a frente no rover, "disse Justin Maki, engenheiro-chefe de imagem e cientista de imagem para Marte 2020 no JPL. "Esta medição é crítica para uma visão estéreo precisa, que é uma capacidade importante do veículo. "
p Para realizar a calibração, a equipe de 2020 criou placas de destino com grades de pontos, colocado em distâncias que variam de 1 a 44 jardas (1 a 40 metros) de distância. Os alvos foram usados para confirmar se as câmeras atendem aos requisitos do projeto para resolução e precisão geométrica. As câmeras testadas incluíram duas Navcams, quatro Hazcams, a SuperCam e as duas câmeras Mastcam-Z.
p "Testamos todas as câmeras na frente do chassi do rover e também aquelas montadas no mastro, "disse Maki." Caracterizar o alinhamento geométrico de todas essas imagens é importante para conduzir o veículo em Marte, operar o braço robótico e mirar com precisão o laser do rover. "
p Nas semanas que vem, os imageadores na parte de trás do corpo do rover e na torre no final do braço do rover passarão por calibração semelhante.
 p O engenheiro Chris Chatellier fica ao lado de um alvo com 1, 600 pontos. A placa foi uma das várias usadas em 23 de julho, 2019, em High Bay 1 da Spacecraft Assembly Facility no Jet Propulsion Laboratory da NASA em Pasadena, Califórnia, para calibrar as câmeras voltadas para a frente no rover Mars 2020. Crédito:NASA / JPL-Caltech
p O engenheiro Chris Chatellier fica ao lado de um alvo com 1, 600 pontos. A placa foi uma das várias usadas em 23 de julho, 2019, em High Bay 1 da Spacecraft Assembly Facility no Jet Propulsion Laboratory da NASA em Pasadena, Califórnia, para calibrar as câmeras voltadas para a frente no rover Mars 2020. Crédito:NASA / JPL-Caltech
p Montado no mastro de sensoriamento remoto do rover, as Navcams (câmeras de navegação) irão adquirir dados de imagens panorâmicas em 3-D que irão apoiar o planejamento da rota, operações de braço robótico, perfuração e aquisição de amostra. As Navcams podem trabalhar em conjunto com as Hazcams (câmeras de prevenção de riscos) montadas na parte inferior do chassi do rover para fornecer vistas complementares do terreno para proteger o rover contra se perder ou colidir com obstáculos inesperados. Eles serão usados por um software que permitirá que o rover Mars 2020 se dirija sozinho sobre o terreno marciano.
p Junto com seu laser e espectrômetros, O gerador de imagens do SuperCam examinará rochas e solo de Marte, em busca de compostos orgânicos que possam estar relacionados a vidas passadas em Marte. As duas câmeras Mastcam-Z de alta resolução do rover funcionarão juntas como um multiespectral, instrumento de imagem estereoscópica para aprimorar as capacidades de condução e amostragem do rover Mars 2020. As câmeras Mastcam-Z também permitirão aos membros da equipe de ciência observar detalhes em rochas e sedimentos em qualquer local dentro do campo de visão do rover, ajudando-os a juntar a história geológica do planeta.
p O JPL está construindo e administrará as operações do rover Mars 2020 para a Diretoria de Missão Científica da NASA na sede da agência em Washington. A NASA usará Marte 2020 e outras missões, incluindo para a Lua, para se preparar para a exploração humana do Planeta Vermelho. A agência pretende estabelecer uma presença humana sustentada na Lua e em torno dela até 2028 por meio dos planos de exploração lunar Artemis da NASA.
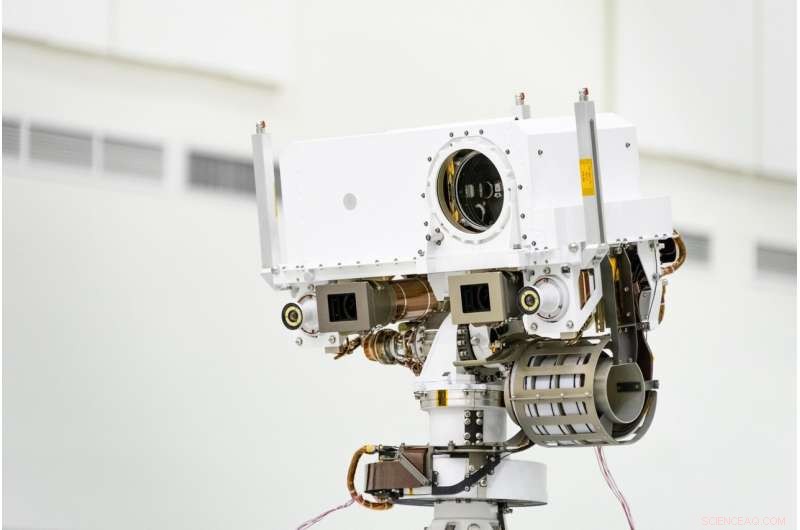 p Esta imagem, tirada na Baía Alta 1 da Instalação de Montagem de Nave Espacial no Laboratório de Propulsão a Jato em Pasadena, Califórnia, em 23 de julho, 2019, mostra um close-up da cabeça do mastro de sensoriamento remoto da Mars 2020. A cabeça do mastro contém o instrumento SuperCam (sua lente está na grande abertura circular). Nas caixas cinza abaixo do topo do mastro estão as duas câmeras Mastcam-Z. Nas laterais externas dessas imagens estão as duas câmeras de navegação do rover. Crédito:NASA / JPL-Caltech
p Esta imagem, tirada na Baía Alta 1 da Instalação de Montagem de Nave Espacial no Laboratório de Propulsão a Jato em Pasadena, Califórnia, em 23 de julho, 2019, mostra um close-up da cabeça do mastro de sensoriamento remoto da Mars 2020. A cabeça do mastro contém o instrumento SuperCam (sua lente está na grande abertura circular). Nas caixas cinza abaixo do topo do mastro estão as duas câmeras Mastcam-Z. Nas laterais externas dessas imagens estão as duas câmeras de navegação do rover. Crédito:NASA / JPL-Caltech