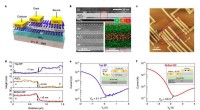
Quad-SDK é uma estrutura de código aberto e full-stack para locomoção quadrúpede ágil. Crédito:Laboratório de Robomecânica, Universidade Carnegie Mellon
Pesquisadores da Carnegie Mellon desenvolveram um software de código aberto que permite movimentos mais ágeis em robôs com pernas.
Os robôs podem ajudar os humanos em tarefas como auxiliar nos esforços de recuperação de desastres ou monitorar o meio ambiente. No caso dos quadrúpedes, robôs que andam sobre quatro patas, sua mobilidade exige que muitos componentes de software funcionem perfeitamente juntos. A maioria dos pesquisadores deve gastar muito do seu tempo desenvolvendo infraestrutura de nível inferior em vez de se concentrar em comportamentos de alto nível.
A equipe de Aaron Johnson no Laboratório de Robomecânica da Faculdade de Engenharia da Carnegie Mellon University experimentou essas frustrações em primeira mão. Os pesquisadores muitas vezes tiveram que confiar em modelos simples para seu trabalho porque as soluções de software existentes não eram de código aberto, não forneciam uma estrutura modular e careciam de funcionalidade de ponta a ponta.
Em um exemplo de inovação nascida da necessidade, Johnson, professor associado de engenharia mecânica, e sua equipe projetaram sua própria pilha de software de locomoção, Quad-SDK, uma estrutura de pilha completa para locomoção quadrúpede ágil.
O design pode simplificar o processo de desenvolvimento para roboticistas em todos os lugares porque usa uma licença de código aberto, o que significa que o software pode ser usado e modificado conforme o usuário desejar. O Quad-SDK vem pronto para uso, para que os pesquisadores não precisem se preocupar com a implementação das ferramentas e infraestrutura; em vez disso, eles podem começar a trabalhar em comportamentos e aplicativos.
O vídeo demonstra planejamento e execução de longo horizonte, mobilidade em terrenos acidentados, suporte a vários robôs, execução de saltos, navegação ao ar livre e muito mais. Crédito:Laboratório de Robomecânica, Universidade Carnegie Mellon Ao contrário de outras opções, o Quad-SDK também é compatível com o Robot Operating System (ROS). O ROS é um middleware, em algum lugar entre hardware e software, que permite que diferentes partes de um sistema conversem entre si. Por exemplo, se um robô detecta um obstáculo em seu caminho e precisa transferir informações de seu módulo de percepção para seu módulo de tomada de decisão, o ROS é o que permite essa comunicação. Imagine um aplicativo que não usa iOS ou Android — é muito mais simples quando tudo funciona em conjunto.
A locomoção é um problema em camadas, como membro da equipe e Ph.D. O estudante Ardalan Tajbakhsh descreve isso:"Para fazer qualquer coisa significativa em um robô, você precisa ter muitos componentes trabalhando juntos de forma integrada." O Quad-SDK fornece uma estrutura para pesquisadores e desenvolvedores de robótica concentrarem seus esforços nos algoritmos principais, em vez das ferramentas e infraestrutura de software.
Outros pacotes de software são muito bons para resolver um componente, como planejamento de movimento, mas é fundamental ter estruturas de ponta a ponta que forneçam os algoritmos, ferramentas e infraestrutura necessários para realizar pesquisas robóticas de alta qualidade.
Quad-SDK é full stack, o que significa que contém todos os níveis da hierarquia que afetam a locomoção quadrúpede, começando com o planejamento global. Uma camada fica no topo da pilha; Tajbakhsh o compara ao Google Maps, porque escolhe onde o robô deve ir para chegar ao seu destino. A próxima camada, o planejador local, é o que decide as especificidades da rota, como onde o robô deve colocar os pés. Isso culmina em uma terceira camada, o driver do robô, que envia comandos para as articulações do quadrúpede para executar o movimento desejado.
Nas semanas desde que o Quad-SDK ganhou o prêmio de melhor artigo no Workshop on Legged Robots na Conferência Internacional de Robótica e Automação do IEEE 2022 (ICRA), as pessoas têm solicitado usá-lo, um indicador de quão úteis são suas soluções e quão o formato de código aberto convida a colaboração dentro da comunidade de robótica.
+ Explorar mais Pesquisadores desenvolvem algoritmo para dividir tarefas para equipes humano-robô