Veículo submarino biônico inspirado em peixes com barbatanas peitorais aumentadas
Crédito:Rui Wang, Instituto de Automação, Academia Chinesa de Ciências
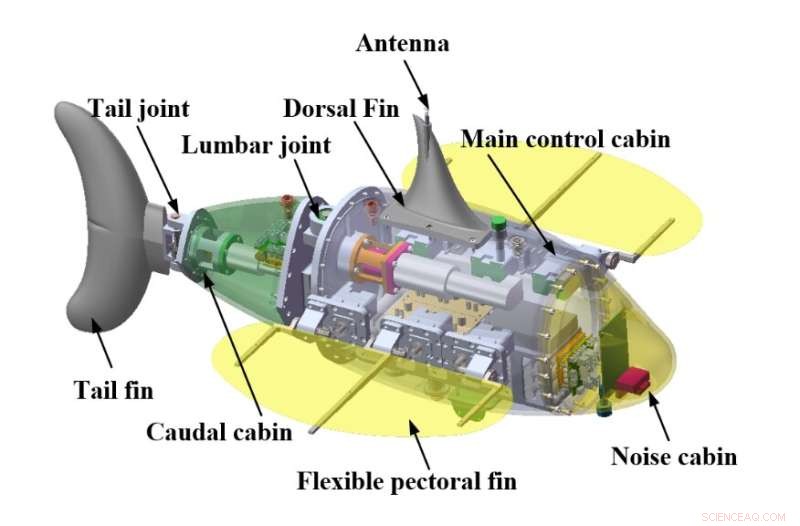
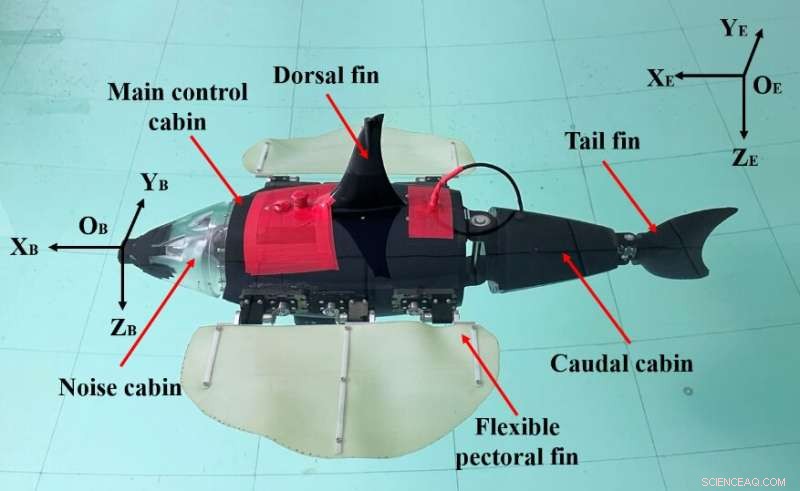
Robôs submarinos estão sendo amplamente utilizados como ferramentas em uma variedade de tarefas marítimas. O RobDact é um desses veículos submarinos biônicos, inspirado em um peixe chamado Dactylopteridae, conhecido por suas barbatanas peitorais aumentadas. Uma equipe de pesquisa combinou dinâmica de fluidos computacional e um experimento de medição de força para estudar o RobDact, criando um modelo hidrodinâmico preciso do RobDact que lhes permite controlar melhor o veículo.
A equipe publicou suas descobertas em
Cyborg and Bionic Systems em 31 de maio de 2022.
Robôs subaquáticos agora são usados para muitas tarefas marítimas, inclusive na indústria pesqueira, exploração submarina e mapeamento. A maioria dos robôs submarinos tradicionais são movidos por uma hélice, que é eficaz para navegar em águas abertas a uma velocidade estável. No entanto, robôs subaquáticos geralmente precisam ser capazes de se mover ou pairar em baixas velocidades em águas turbulentas, enquanto realizam uma tarefa específica. É difícil para a hélice mover o robô nessas condições. Outro fator quando um robô subaquático está se movendo em baixas velocidades em águas instáveis é o movimento de "contração" da hélice. Essa contração gera pulsos de fluido imprevisíveis que reduzem a eficiência do robô.
Nos últimos anos, pesquisadores trabalharam para criar robôs submarinos que imitam criaturas vivas. Esses veículos biônicos se movem pela água de maneira semelhante à maneira como os peixes ou as arraias se movem. Em comparação com os veículos subaquáticos tradicionais de propulsão, esses veículos submarinos biônicos operam com mais eficiência e robustez na água, além de serem ecologicamente corretos.
Crédito:Rui Wang, Instituto de Automação, Academia Chinesa de Ciências
Robôs subaquáticos são afetados pelo fluido circundante à medida que se movem pela água. Este fenômeno é chamado de efeito hidrodinâmico. Enquanto se move na água, o robô deve lidar com fluxo e força de água desconhecidos, o que pode causar mudanças desnecessárias na posição do robô.
Para controlar melhor o robô, os pesquisadores precisam de um modelo hidrodinâmico mais preciso. Criar este modelo geralmente é muito complexo e difícil. Além disso, o ambiente subaquático real é mutável e difícil de prever, de modo que os parâmetros do modelo podem mudar com uma mudança no ambiente. Pesquisadores têm usado dinâmica de fluidos computacional para criar modelos hidrodinâmicos para robôs submarinos.
No entanto, os modelos criados apenas com a dinâmica de fluidos computacional não são tão precisos e práticos quanto deveriam ser. Para superar esse desafio, a equipe de pesquisa tentou uma abordagem diferente. "Para tornar o modelo hidrodinâmico mais preciso e prático, combinamos a dinâmica computacional de fluidos e um experimento de medição de força", disse Rui Wang, pesquisador do Instituto de Automação da Academia Chinesa de Ciências.
Crédito:Rui Wang, Instituto de Automação, Academia Chinesa de Ciências
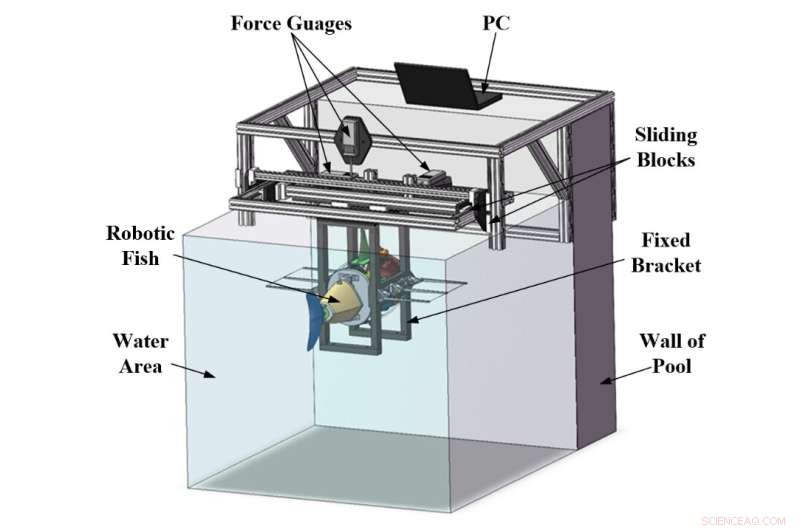
Usando a dinâmica de fluidos computacional, os pesquisadores identificaram os parâmetros no modelo hidrodinâmico. Em seguida, eles desenvolveram uma plataforma de medição de força para obter a força gerada pelo veículo RobDact. Com este processo, eles poderiam obter tanto a força perturbadora quanto a força gerada pelo RobDact em qualquer ambiente complexo. “Isso pode nos ajudar a ter uma melhor compreensão do estado de movimento do veículo subaquático e controlar o veículo subaquático com mais precisão”, disse Qiyuan Cao, pesquisador do Instituto de Automação da Academia Chinesa de Ciências.
Com seu experimento, a equipe conseguiu determinar a força hidrodinâmica do RobDact em diferentes velocidades. A plataforma de medição de força que eles desenvolveram permitiu medir a força do RobDact nas direções X, Y e Z. Eles estabeleceram uma relação de mapeamento entre os parâmetros de flutuação do RobDact e o impulso do veículo por meio de seus experimentos de medição de força. Ao mesclar o modelo dinâmico de corpo rígido do RobDact com o modelo de mapeamento de empuxo, os pesquisadores conseguiram desenvolver um modelo hidrodinâmico preciso e prático do RobDact em movimentos variados.
Olhando para o futuro, os pesquisadores pretendem estudar o controle inteligente de veículos submarinos biônicos usando o modelo hidrodinâmico em conjunto com métodos de inteligência artificial, como aprendizado por reforço. “O objetivo final é promover a aplicação prática de veículos submarinos biônicos no monitoramento do ambiente aquático e busca e resgate subaquáticos”, disse Wang.
+ Explorar mais Um método inspirado em castores para guiar os movimentos de um robô nadador de uma perna