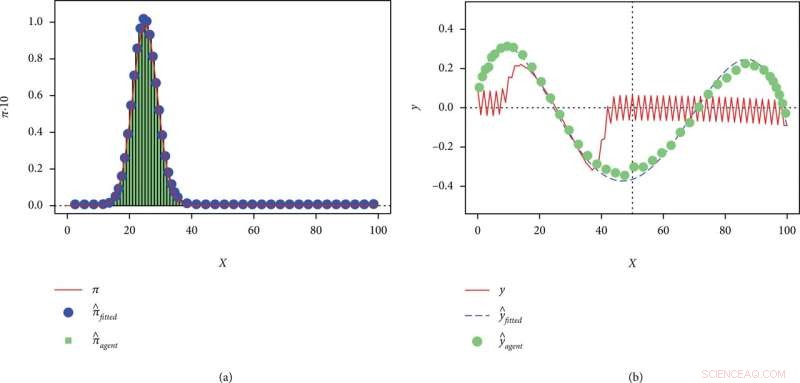
Resultados para o cenário unimodal. Ilustração do método de projeto e comparação com simulações multiagentes para o cenário unimodal:(a) representa a distribuição estacionária e (b) a mudança esperada. Crédito:Computação Inteligente (2022). DOI:10.34133/2022/9761694
As algas florescem, os pássaros voam e os insetos enxameiam. Esse comportamento em massa de organismos individuais pode fornecer um bem separado e coletivo, como melhorar as chances de propagação de acasalamento bem-sucedida ou fornecer segurança. Agora, os pesquisadores aproveitaram as habilidades de auto-organização necessárias para colher os benefícios de enxames naturais para aplicações robóticas em inteligência artificial, computação, busca e resgate e muito mais.
Eles publicaram seu método em 3 de agosto na revista
Intelligent Computing .
“Projetar um conjunto de regras que, uma vez executados por um enxame de robôs, resulta em um comportamento desejado específico é particularmente desafiador”, disse o autor correspondente Marco Dorigo, professor do laboratório de inteligência artificial, chamado IRIDIA, da Université Libre de Bruxelles, Bélgica. “O comportamento do enxame não é um mapa um-para-um com regras simples executadas por robôs individuais, mas resulta das interações complexas de muitos robôs executando o mesmo conjunto de regras”.
Em outras palavras, os robôs devem trabalhar juntos para atingir o objetivo de soma de contribuições discretas. A questão, de acordo com Dorigo e seus co-autores Dr. Valentini e Prof. Hamann, é que o projeto convencional de unidades individuais para atingir um objetivo coletivo é de baixo para cima, exigindo refinamentos de tentativa e erro que podem ser caros.
"Para enfrentar esse desafio, propomos uma nova abordagem de design global para local", disse Dorigo. “Nossa ideia principal é compor um enxame heterogêneo usando grupos de agentes comportamentalmente diferentes, de modo que o comportamento do enxame resultante se aproxime de uma entrada do usuário representando o comportamento de todo o enxame”.
Essa composição envolve a seleção de agentes individuais com comportamentos predeterminados que os pesquisadores sabem que trabalharão juntos para atingir o comportamento coletivo alvo. Eles perdem a capacidade de programar unidades individuais localmente, mas de acordo com Valentini, Hamann e Dorigo, a troca vale a pena. Eles apontaram o exemplo de uma tarefa de vigilância, onde um enxame pode precisar monitorar uma instalação que requer mais monitoramento interno durante o dia e mais monitoramento externo à noite.
“O usuário fornece uma descrição das alocações de enxames desejadas como uma distribuição de probabilidade no espaço de todas as alocações de enxames possíveis – mais agentes dentro durante o dia, mais fora à noite ou vice-versa”, disse Valentini.
O usuário definiria o comportamento alvo alterando o número e a posição dos modos de distribuição, sendo que cada modo corresponderia a uma alocação específica, como 80% dos agentes dentro, 20% fora durante o dia e 30% dentro, 70% fora à noite. Isso permite que o enxame mude o comportamento periodicamente e de forma autônoma, predeterminado pelos modos definidos, conforme as circunstâncias mudam.
“Embora seja difícil encontrar as regras de controle exatas para robôs para que o enxame se comporte como desejamos, um comportamento de enxame desejado pode ser obtido combinando diferentes conjuntos de regras de controle que já entendemos”, disse Dorigo. "Comportamentos de enxames podem ser projetados macroscopicamente misturando robôs de diferentes conjuntos de regras pré-definidas."
Esta não é a primeira vez que Dorigo recorre à natureza para melhorar as abordagens da ciência da computação. Ele desenvolveu anteriormente o algoritmo de otimização de colônias de formigas, baseado em como as formigas navegam entre suas colônias e fontes de alimento, para resolver problemas de computação difíceis que envolvem encontrar uma boa aproximação de um caminho ótimo em um grafo.
Embora Dorigo tenha proposto essa abordagem pela primeira vez para um problema relativamente simples, desde então ela evoluiu como um meio de abordar uma variedade de problemas. Dorigo disse que planeja levar a metodologia do enxame em uma direção semelhante.
“Nosso próximo passo imediato é demonstrar a validade de nossa metodologia em um conjunto maior de comportamentos de enxame e ir além da alocação de tarefas”, disse Dorigo. “Nosso objetivo final é entender o que torna isso possível, formalizando uma teoria genérica para permitir que pesquisadores e engenheiros projetem comportamentos de enxames sem passar pelo processo meticuloso de tentativa e erro”.
+ Explorar mais Menos comunicação entre robôs permite que eles tomem melhores decisões