Robótica avançada para resolver a lacuna translacional na engenharia de tendões:artigo de revisão
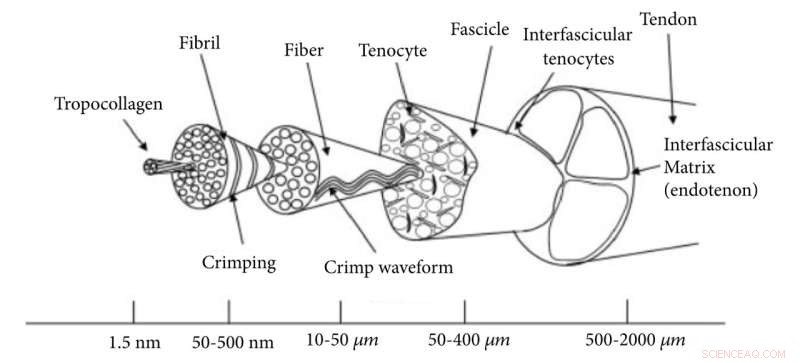
Estrutura hierárquica do tecido tendinoso (adaptado de Thorpe et al). Crédito:Cyborg e Sistemas Biônicos (2022). DOI:10.34133/2022/9842169
Um artigo de revisão de cientistas da Universidade de Oxford discutiu possíveis benefícios do uso de robôs musculoesqueléticos humanóides e sistemas robóticos macios como plataformas de biorreatores na produção de construções de tendões clinicamente úteis.
O novo artigo de revisão, publicado em 15 de setembro de 2022 na revista
Cyborg and Bionic Systems , resume as tendências atuais na engenharia de tecidos tendinosos e discute como os biorreatores convencionais são incapazes de fornecer estimulação mecânica fisiologicamente relevante, uma vez que dependem amplamente de estágios de tração uniaxiais. O artigo então destaca robôs humanóides musculoesqueléticos e sistemas robóticos macios como plataformas para fornecer estimulação mecânica fisiologicamente relevante que poderia superar essa lacuna translacional.
As lesões de tendões e tecidos moles são um problema social e econômico crescente, com o mercado de reparo de tendões nos Estados Unidos sendo estimado em US$ 1,5 bilhão. As cirurgias de reparo do tendão têm altas taxas de revisão, com mais de 40% dos reparos do manguito rotador falhando no pós-operatório. A produção de enxertos de tendão projetados para uso clínico é uma solução potencial para esse desafio. Os biorreatores de tendão convencionais fornecem principalmente estimulação de tração uniaxial. A falta de sistemas que recapitulem in vivo o carregamento do tendão é uma grande lacuna translacional.
"O corpo humano fornece aos tendões estresse mecânico tridimensional na forma de tensão, compressão, torção e cisalhamento. Pesquisas atuais sugerem que o tecido tendinoso nativo saudável requer vários tipos e direções de estresse. Sistemas robóticos avançados, como humanóides musculoesqueléticos e robótica plataformas promissoras que podem ser capazes de imitar o carregamento do tendão in vivo", explicou o autor Iain Sander, pesquisador da Universidade de Oxford com o Soft Tissue Engineering Research Group.
Os robôs humanóides musculoesqueléticos foram inicialmente projetados para aplicações como manequins de teste de colisão, próteses e aprimoramento atlético. Eles tentam imitar a anatomia humana por ter proporções corporais semelhantes, estrutura esquelética, arranjo muscular e estrutura articular. Humanóides musculoesqueléticos, como Roboy e Kenshiro, usam sistemas acionados por tendões com atuadores miorobóticos que imitam o tecido neuromuscular humano.
As unidades miorobóticas consistem em um motor CC sem escova que gera tensão como os músculos humanos, cabos de fixação que atuam como a unidade do tendão e uma placa de acionamento do motor com um codificador de mola, que atua como o sistema neurológico detectando variáveis, incluindo tensão, compressão, comprimento do músculo , e temperatura.
As vantagens propostas dos humanóides musculoesqueléticos incluem a capacidade de fornecer carga multiaxial, potencial de carga em consideração aos padrões de movimento humano e fornecimento de magnitudes de carga comparáveis às forças in vivo. Um estudo recente demonstrou a viabilidade do crescimento de tecido humano em um robô humanóide musculoesquelético para engenharia de tendões.
A robótica flexível biohíbrida está focada no desenvolvimento de sistemas robóticos biomiméticos e compatíveis que permitem interações adaptáveis e flexíveis com ambientes imprevisíveis. Esses sistemas robóticos são acionados por meio de várias modalidades, incluindo temperatura, pressão pneumática e hidráulica e luz.
Eles são feitos de materiais macios, incluindo hidrogéis, borracha e até mesmo tecido musculoesquelético humano. Esses sistemas já estão sendo usados para fornecer estimulação mecânica para construções de tecido muscular liso e foram implementados in vivo em um modelo suíno.
Esses sistemas são atraentes para a engenharia de tecidos tendinosos, pois:i) suas propriedades flexíveis e complacentes permitem que eles envolvam estruturas anatômicas, mimetizando a configuração do tendão nativo ii) eles são capazes de fornecer atuação multiaxial e iii) uma série de técnicas usadas em a robótica macia se sobrepõe às práticas atuais de engenharia de tecidos de tendões.
Olhando para o futuro, a equipe prevê sistemas robóticos avançados como plataformas que fornecerão estímulo mecânico fisiologicamente relevante para enxertos de tendão antes do uso clínico. Há uma série de desafios a serem considerados à medida que sistemas robóticos avançados são implementados. Em primeiro lugar, será importante para experimentos futuros comparar as tecnologias propostas nesta revisão com os biorreatores convencionais.
Com o desenvolvimento de sistemas capazes de fornecer carregamento multiaxial, será importante encontrar métodos para quantificar deformação em 3D. Finalmente, os sistemas robóticos avançados precisarão ser mais baratos e acessíveis para implementação generalizada.
"Um número crescente de grupos de pesquisa está mostrando que é viável usar robótica avançada em combinação com células e tecidos vivos para engenharia de tecidos e aplicações de bioatuação. Estamos agora em um estágio empolgante onde podemos explorar as diferentes possibilidades de incorporar essas tecnologias em engenharia de tecidos tendinosos e examinar se eles podem realmente ajudar a melhorar a qualidade dos enxertos de tendões projetados", disse Pierre-Alexis Mouthuy, autor sênior do artigo de revisão.
A longo prazo, essas tecnologias têm potencial para melhorar a qualidade de vida dos indivíduos, diminuindo a dor e o risco de falha no reparo do tendão, para os sistemas de saúde, reduzindo o número de cirurgias de revisão, e para a economia, melhorando a produtividade no local de trabalho e diminuindo custos de saúde.
+ Explorar mais Usando um ombro robótico para desenvolver tecido tendinoso