
Os pesquisadores do MIT criaram uma pele "sensorizada", feito com sensores inspirados no kirigami, que dá aos robôs soft uma maior consciência do movimento e da posição de seus corpos. Crédito:Ryan L. Truby, MIT CSAIL
Pela primeira vez, Os pesquisadores do MIT permitiram que um braço robótico macio entendesse sua configuração no espaço 3-D, aproveitando apenas os dados de movimento e posição de sua própria pele "sensorizada".
Robôs macios construídos com materiais altamente compatíveis, semelhantes aos encontrados em organismos vivos, estão sendo defendidos como mais seguros, e mais adaptável, resiliente, e alternativas bioinspiradas aos robôs rígidos tradicionais. Mas dar controle autônomo a esses robôs deformáveis é uma tarefa monumental, porque eles podem se mover em um número virtualmente infinito de direções a qualquer momento. Isso dificulta o treinamento de modelos de planejamento e controle que impulsionam a automação.
Os métodos tradicionais para obter controle autônomo usam grandes sistemas de várias câmeras de captura de movimento que fornecem feedback aos robôs sobre o movimento e as posições 3-D. Mas isso não é prático para robôs soft em aplicações do mundo real.
Em um artigo que está sendo publicado na revista IEEE Robótica e Cartas de Automação , os pesquisadores descrevem um sistema de sensores suaves que cobrem o corpo de um robô para fornecer "propriocepção" - o que significa consciência de movimento e posição de seu corpo. Esse feedback é executado em um novo modelo de aprendizado profundo que analisa o ruído e captura sinais claros para estimar a configuração 3-D do robô. Os pesquisadores validaram seu sistema em um braço robótico macio semelhante a uma tromba de elefante, que pode prever sua própria posição conforme ela oscila e se estende autonomamente.
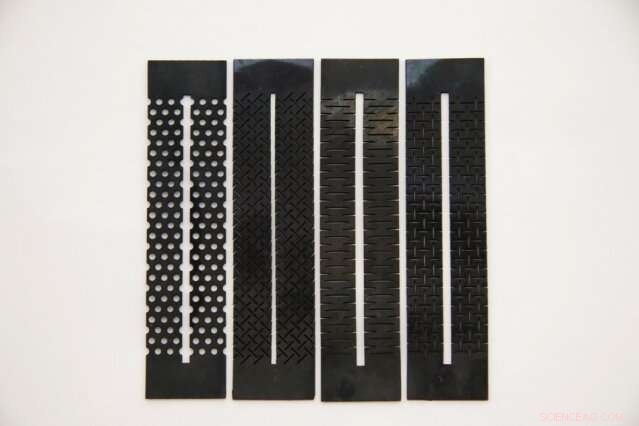
Os sensores macios dos pesquisadores são folhas de silicone condutor cortadas em padrões de kirigami. Eles têm propriedades "piezoresistivas", o que significa que eles mudam na resistência elétrica quando tensionados. Conforme o sensor se deforma em resposta ao alongamento e compressão do braço robótico, sua resistência elétrica é convertida em uma tensão de saída que é então usada como um sinal correlacionado a esse movimento. Crédito:Ryan L. Truby, MIT CSAIL
Os sensores podem ser fabricados com materiais prontos para uso, o que significa que qualquer laboratório pode desenvolver seus próprios sistemas, diz Ryan Truby, um pós-doutorado no Laboratório Artificial e Ciência da Computação do MIT (CSAIL) que é o co-autor do artigo junto com o pós-doutorado CSAIL Cosimo Della Santina.
"Estamos sensorizando robôs soft para obter feedback de controle dos sensores, não sistemas de visão, usando um muito fácil, método rápido de fabricação, "ele diz." Queremos usar esses troncos robóticos macios, por exemplo, para se orientar e controlar automaticamente, para pegar coisas e interagir com o mundo. Este é o primeiro passo em direção a esse tipo de controle automatizado mais sofisticado. "
Um objetivo futuro é ajudar a fazer membros artificiais que possam manusear e manipular objetos no ambiente com mais destreza. "Pense em seu próprio corpo:você pode fechar os olhos e reconstruir o mundo com base no feedback de sua pele, "diz a co-autora Daniela Rus, diretor do CSAIL e o professor Andrew e Erna Viterbi de Engenharia Elétrica e Ciência da Computação. "Queremos projetar essas mesmas capacidades para robôs soft."
Moldar sensores suaves

Crédito:Massachusetts Institute of Technology
Um objetivo de longa data na robótica suave são os sensores corporais totalmente integrados. Sensores rígidos tradicionais prejudicam a conformidade natural do corpo macio de um robô, complicam seu design e fabricação, e pode causar várias falhas mecânicas. Sensores baseados em material macio são uma alternativa mais adequada, mas requerem materiais e métodos especializados para seu projeto, tornando-os difíceis para muitos laboratórios de robótica fabricar e integrar em robôs soft.
Enquanto trabalhava em seu laboratório CSAIL um dia em busca de inspiração para materiais de sensores, Truby fez uma conexão interessante. "Encontrei essas folhas de materiais condutores usados para blindagem de interferência eletromagnética, que você pode comprar em qualquer lugar em rolos, ", diz ele. Esses materiais têm propriedades" piezoresistivas ", o que significa que eles mudam na resistência elétrica quando tensionados. Truby percebeu que eles poderiam fazer sensores suaves eficazes se fossem colocados em determinados pontos do tronco. À medida que o sensor se deforma em resposta ao alongamento e compressão do tronco, sua resistência elétrica é convertida em uma tensão de saída específica. A tensão é então usada como um sinal correlacionado a esse movimento.
Mas o material não esticou muito, o que limitaria seu uso para robótica leve. Inspirado no kirigami, uma variação do origami que inclui fazer cortes em um material, Truby projetou e cortou a laser tiras retangulares de folhas de silicone condutor em vários padrões, como fileiras de orifícios minúsculos ou fatias entrecruzadas como uma cerca de arame. Isso os tornou muito mais flexíveis, extensível, "e bonito de se ver, "Truby diz.
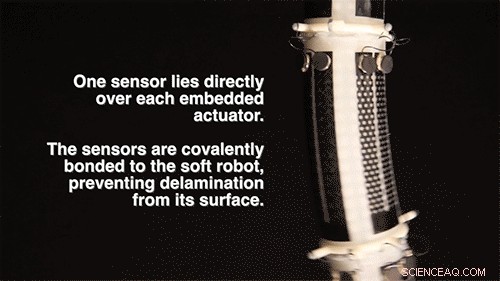
O tronco robótico dos pesquisadores compreende três segmentos, cada um com quatro atuadores fluídicos (12 no total) usados para mover o braço. Eles fundiram um sensor em cada segmento, com cada sensor cobrindo e reunindo dados de um atuador embutido no robô macio. Eles usaram "ligação de plasma, "uma técnica que energiza a superfície de um material para fazê-lo se ligar a outro material. Demora cerca de algumas horas para formar dezenas de sensores que podem ser ligados aos robôs macios usando um dispositivo de ligação de plasma portátil.

Crédito:Massachusetts Institute of Technology
Como hipotetizado, os sensores capturaram o movimento geral do tronco. Mas eles eram muito barulhentos. "Essencialmente, eles são sensores não ideais de muitas maneiras, "Truby diz." Mas isso é apenas um fato comum de fazer sensores de materiais condutores macios. Sensores de alto desempenho e mais confiáveis requerem ferramentas especializadas que a maioria dos laboratórios de robótica não possui. "
Para estimar a configuração do robô soft usando apenas os sensores, os pesquisadores construíram uma rede neural profunda para fazer a maior parte do trabalho pesado, filtrando o ruído para capturar sinais de feedback significativos. Os pesquisadores desenvolveram um novo modelo para descrever cinematicamente a forma do robô macio que reduz enormemente o número de variáveis necessárias para o seu modelo processar.
Crédito:Ryan L. Truby, MIT CSAIL
Em experimentos, os pesquisadores fizeram o tronco girar e se estender em configurações aleatórias por aproximadamente uma hora e meia. Eles usaram o sistema de captura de movimento tradicional para dados de verdade do solo. Em treinamento, o modelo analisou dados de seus sensores para prever uma configuração, e comparou suas previsões com os dados da verdade fundamental que estavam sendo coletados simultaneamente. Ao fazer isso, o modelo "aprende" a mapear padrões de sinal de seus sensores para configurações do mundo real. Resultados indicados, que para configurações certas e mais estáveis, a forma estimada do robô combinava com a verdade do terreno.
Próximo, os pesquisadores pretendem explorar novos designs de sensores para melhorar a sensibilidade e desenvolver novos modelos e métodos de aprendizagem profunda para reduzir o treinamento necessário para cada novo robô macio. Eles também esperam refinar o sistema para capturar melhor os movimentos dinâmicos completos do robô.
Atualmente, a rede neural e a pele do sensor não são sensíveis para capturar movimentos sutis ou dinâmicos. Mas, por enquanto, este é um primeiro passo importante para abordagens baseadas em aprendizagem para controle robótico suave, Truby diz:"Como nossos robôs soft, os sistemas vivos não precisam ser totalmente precisos. Humanos não são máquinas precisas, em comparação com nossas contrapartes robóticas rígidas, e nos saímos bem. "
Esta história foi republicada por cortesia do MIT News (web.mit.edu/newsoffice/), um site popular que cobre notícias sobre pesquisas do MIT, inovação e ensino.














