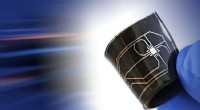
Mão robótica integrada com sensor tátil. Crédito:Instituto Coreano de Máquinas e Materiais (KIMM)
O Instituto Coreano de Máquinas e Materiais (Presidente Chunhong Park; doravante "KIMM") desenvolveu uma mão robótica capaz de manusear vários objetos e ferramentas na vida diária, como segurar um ovo e cortar papel com uma tesoura. A mão pode ser facilmente montada em uma variedade de braços de robô, e oferece a força de agarramento mais forte do mundo contra seu próprio peso. Espera-se que o uso de mãos robóticas seja estendido a locais industriais e também à vida cotidiana.
A equipe liderada pelo Dr. Hyunmin Do, pesquisador principal do Departamento de Robótica e Mecatrônica da Divisão de Pesquisa de Sistemas de Fabricação Avançada da KIMM, desenvolveu uma mão robótica capaz de manipular objetos da mesma forma que as mãos humanas, imitando a estrutura e o movimento dos dedos humanos.
A mão do robô é composta por quatro dedos e 16 articulações. Um total de 12 motores são usados para mover cada dedo e junta independentemente.
A equipe de pesquisa desenvolveu um mecanismo único para apoiar o movimento em pequenos espaços com alto grau de liberdade, semelhante ao movimento de uma mão humana. Eles conseguiram modularizar a unidade motriz responsável pelo movimento dos dedos, incorporando-a na palma da mão. A mão do robô pode ser facilmente montada em uma variedade de braços do robô.
Além disso, a mão do robô desenvolvida é mais leve e mais forte do que as mãos do robô disponíveis comercialmente. Seu peso é inferior a 1 kg, mas sua carga útil é superior a 3 kg.
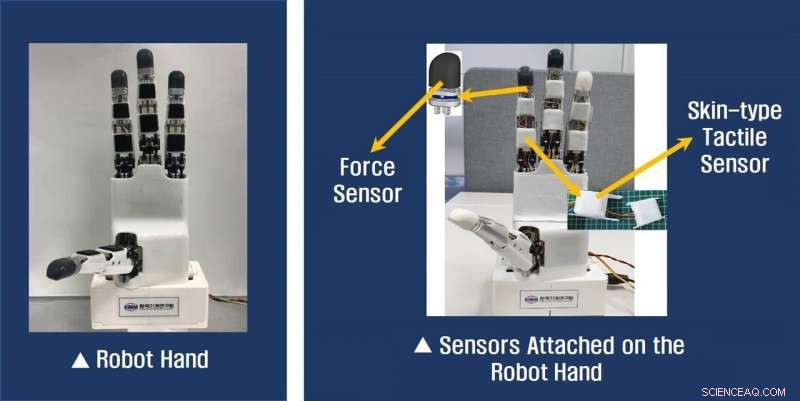
A equipe de pesquisa desenvolveu dois tipos de sensores de força para permitir a detecção tátil para detectar o contato com objetos, e os prendeu nas pontas dos dedos, dedos e a palma da mão. Os sensores presos às pontas dos dedos são sensores multieixos de força / torque com um diâmetro de 15 mm e um peso inferior a 5 g. Eles podem medir a magnitude e a direção da força detectada na ponta do dedo quando a mão do robô entra em contato com um objeto. Os sensores são a chave para controlar a força de preensão.
Sensores táteis do tipo pele desenvolvidos por meio de pesquisa conjunta com a Universidade Nacional de Seul também foram acoplados aos dedos e à palma da mão. Esses sensores medem a distribuição de força na área de contato quando a mão do robô toca um objeto.
Mãos de robôs comerciais desenvolvidas até agora têm aplicações limitadas, já que não há produtos modularizados equipados com unidades de acionamento embutidas na área da palma da mão e sensores táteis embutidos.
Dr. Hyunmin Do disse, “A mão do robô foi desenvolvida para lidar com vários objetos, incluindo as ferramentas usadas na vida cotidiana, imitando o movimento delicado de uma mão humana. Também deve ser usada como uma plataforma de pesquisa para estudar o algoritmo de preensão da mão do robô e a inteligência de manipulação. "